Vision measurement, path planning and GNC integrated simulation system for space robot
A space robot and path planning technology, applied in the direction of measuring devices, instruments, integrated navigators, etc., can solve the problems of closed-loop simulation verification of space robot path planning dynamics without consulting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
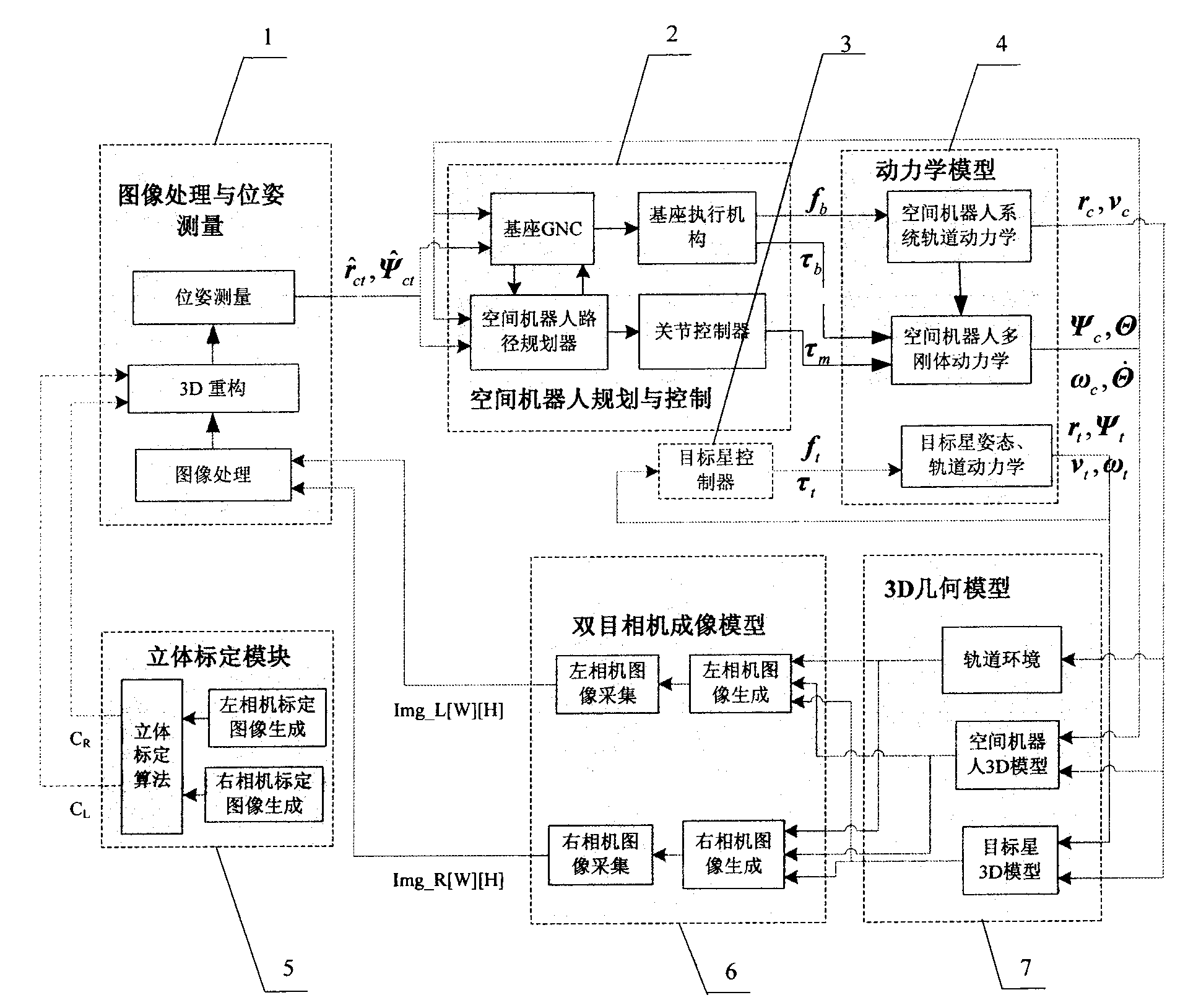
[0047] 1. System composition
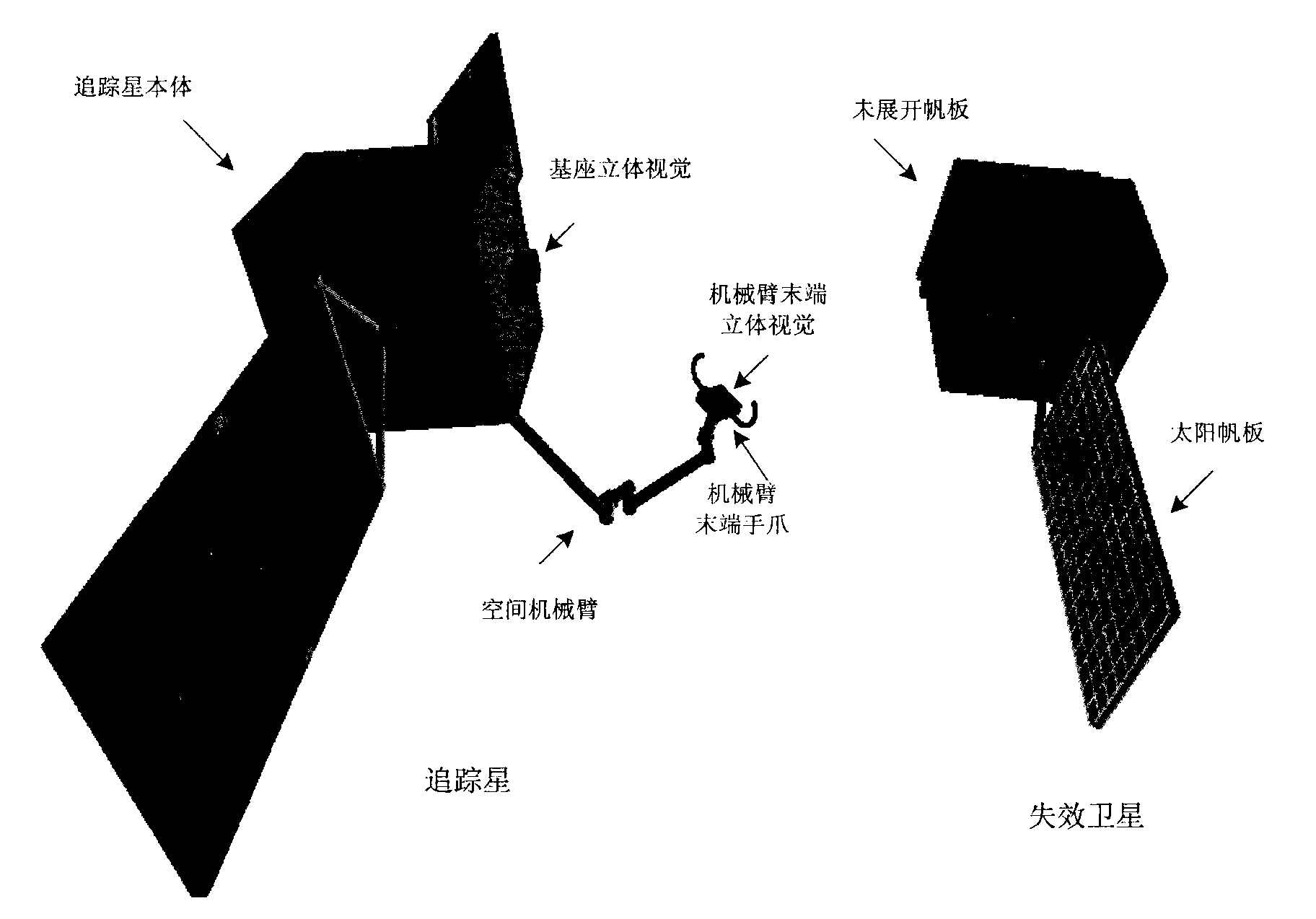
[0048] Typical on-orbit service ideas of space robots are as follows: figure 1 As shown, the space robot system is used to track, approach, capture, dock, repair and other operations on the faulty satellite. The on-orbit service process can be roughly divided into the following stages:
[0049] (i) Long-distance tracking and approaching: the space robot system maneuvers from its own orbit to a position about 300m away from the target satellite;
[0050] (ii) Mid-range tracking approach: the space robot system maneuvers from 300m to a position about 15m away from the target satellite;
[0051] (iii) Proximity rendezvous and docking: the space robot system maneuvers from a position of about 15m to a position of about 1m, and performs relative docking so that the target satellite is in the working space of the manipulator;
[0052] (iv) On-orbit capture and docking: use the space manipulator to capture the target satellite and dock it with the ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com