Passive driving type two-freedom degree artificial finger for disabled person
A technology for passive driving and disabled people, applied in the direction of artificial arms, etc., to achieve the effect of simple structure, easy and fast installation, and simple and fast connection
Active Publication Date: 2011-01-05
哈尔滨恒德机器人技术有限公司
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
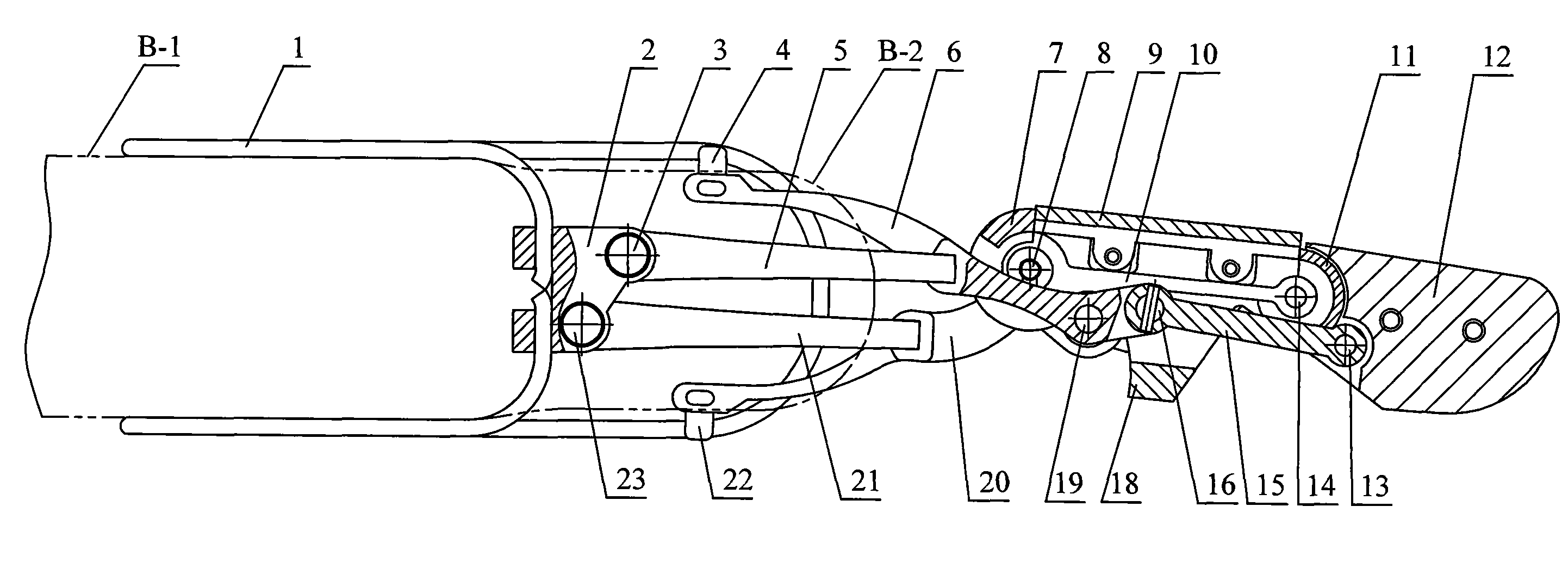
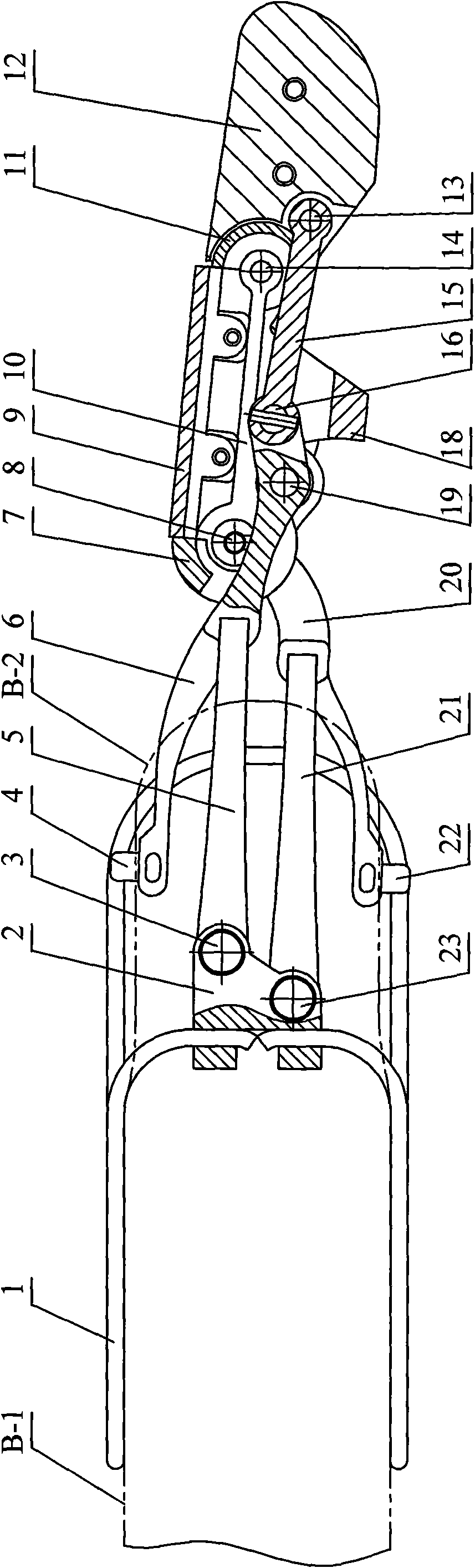
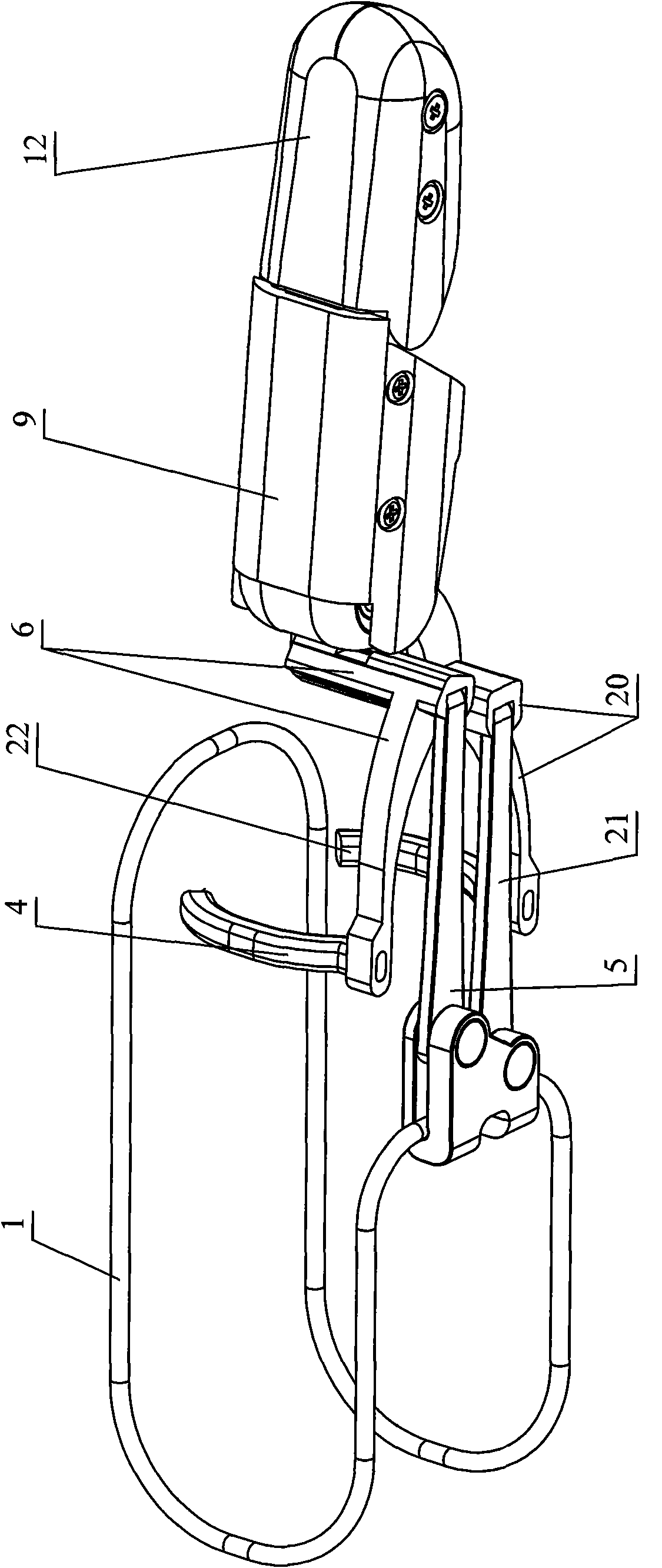
In order to solve the problem that there is no artificial finger suitable for patients with residual base knuckles that can passively drive the two-degree-of-freedom disabled person, the present invention further provides a passive-driven two-degree-of-freedom artificial finger for the disabled, which can use the remaining base Knuckle actuation to achieve extension and lateral swing of prosthetic finger (two degrees of freedom)
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
specific Embodiment approach 2
specific Embodiment approach 3
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention provides a passively driven type artificial finger used for two degrees of freedom disabled people, which relates to the artificial finger for disabled people. The artificial finger solves the problem that the artificial finger which is applicable to a base finger knuckle residual patient and can be passively driven by two degrees of freedom disabled people does not exist at present. The front end of a link spring support is in rotating connection with a substrate; one end of an upper connecting rod of the base finger knuckle and one end of a lower connecting rod of the base finger knuckle are connected with the substrate; the other end of the upper connecting rod of the base finger knuckle is fixedly connected with the middle part of an upper stop lever of the base finger knuckle; the other end of the lower connecting rod of the base finger knuckle is fixedly connected with the middle part of a lower stop lever of the base finger knuckle; one end of the upper stop leverof the base finger knuckle is fixedly connected with one end of an upper wire stop; one end of the lower stop lever of the base finger knuckle is fixedly connected with one end of a lower wire stop; and the other end of the upper stop lever of the base finger knuckle and the other end of the lower stop lever of the base finger knuckle are connected with a middle finger knuckle framework respectively. The artificial finger realizes three-dimensional motion of the artificial finger in the passively driven mode in two degrees of freedom, namely stretching and laterally swinging, without external power drive, and has the advantages of simple and rapid assembly and personated motion mode.
Description
Passive-driven two-degree-of-freedom artificial finger for the handicapped technical field The invention relates to a prosthetic finger for a disabled person, in particular to a prosthetic finger for a disabled person driven by a residual finger. Background technique Functional prosthetic hands are prosthetics that can achieve hand-like movement. Most of the functional prosthetic hands for the disabled are powered by external power drives, and the power sources involve electric, pneumatic and hydraulic drives. Due to the need to integrate the power source into the prosthetic hand, the prosthetic hand is too bulky and is only suitable for the handicapped with full palms. The narrow application area cannot meet the needs, and the application range is limited. At present, the relatively successful commercial functional prosthetic hands require the handicapped to be completely disabled, and even the remaining length of the forearm is not required to be too long. According to ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Patents(China)
IPC IPC(8): A61F2/54
Inventor 杨会生刘伊威赵京东姜力刘宏
Owner 哈尔滨恒德机器人技术有限公司
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com