Camera based six degree-of-freedom target measuring and target tracking device with rotatable mirror
A mirror, camera technology, used in measuring devices, re-radiation of electromagnetic waves, radio wave measurement systems, etc., can solve the problems of inaccurate, expensive, and time-consuming repositioning procedures for measuring radial distances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
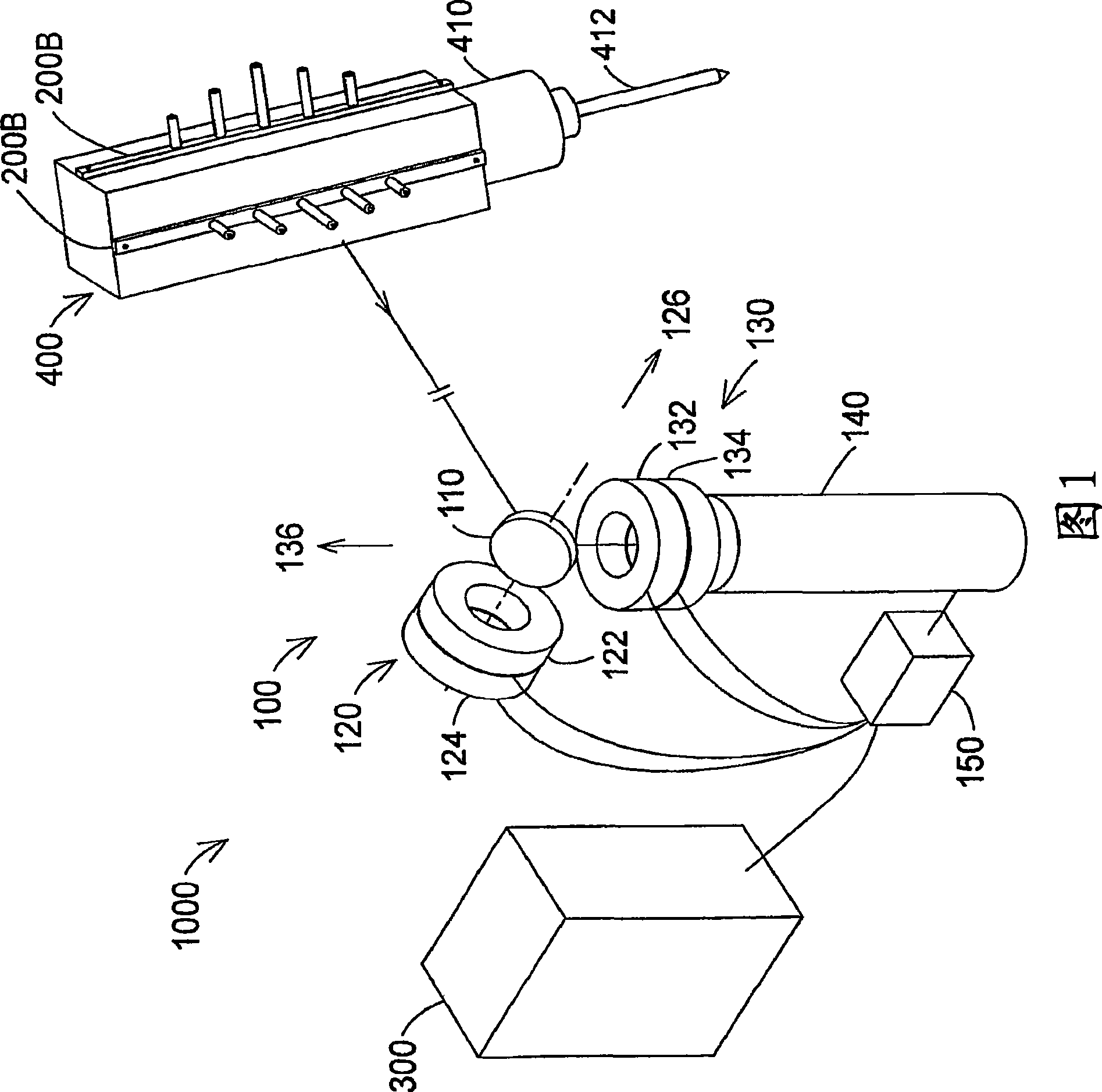
[0028] As shown in FIG. 1 , an exemplary six-degree-of-freedom (6-DOF) tracker 1000 may include a tracking camera arrangement 100 , a target 400 and a computer 300 . Six degrees of freedom may be, for example, x, y, z coordinates of target 400 as well as pitch, roll, and yaw.
[0029] The entire tracking camera device 100 may include a mirror 110 , a first angle component 120 , a second angle component 130 , a camera 140 and a processor 150 .
[0030] The first angle assembly 120 includes a first angle shaft (not shown) on which a goniometer 122 and a motor 124 are mounted. The goniometer 122 is preferably an angle encoder and the motor 124 is preferably a servo motor. A first angular axis (not shown) rotates about a first axis 126, which in this figure is the zenith axis. The first and second axes intersect at a point in space known as the gimbal node.
[0031] The second angle assembly 130 includes a second angle shaft (not shown) on which a goniometer 132 and a motor 134...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com