Two freedom space parallel mechanism
A technology with a degree of freedom and space, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low flexibility, poor practicability, and large size, and achieve wide application prospects, high load capacity, and simple reverse solution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
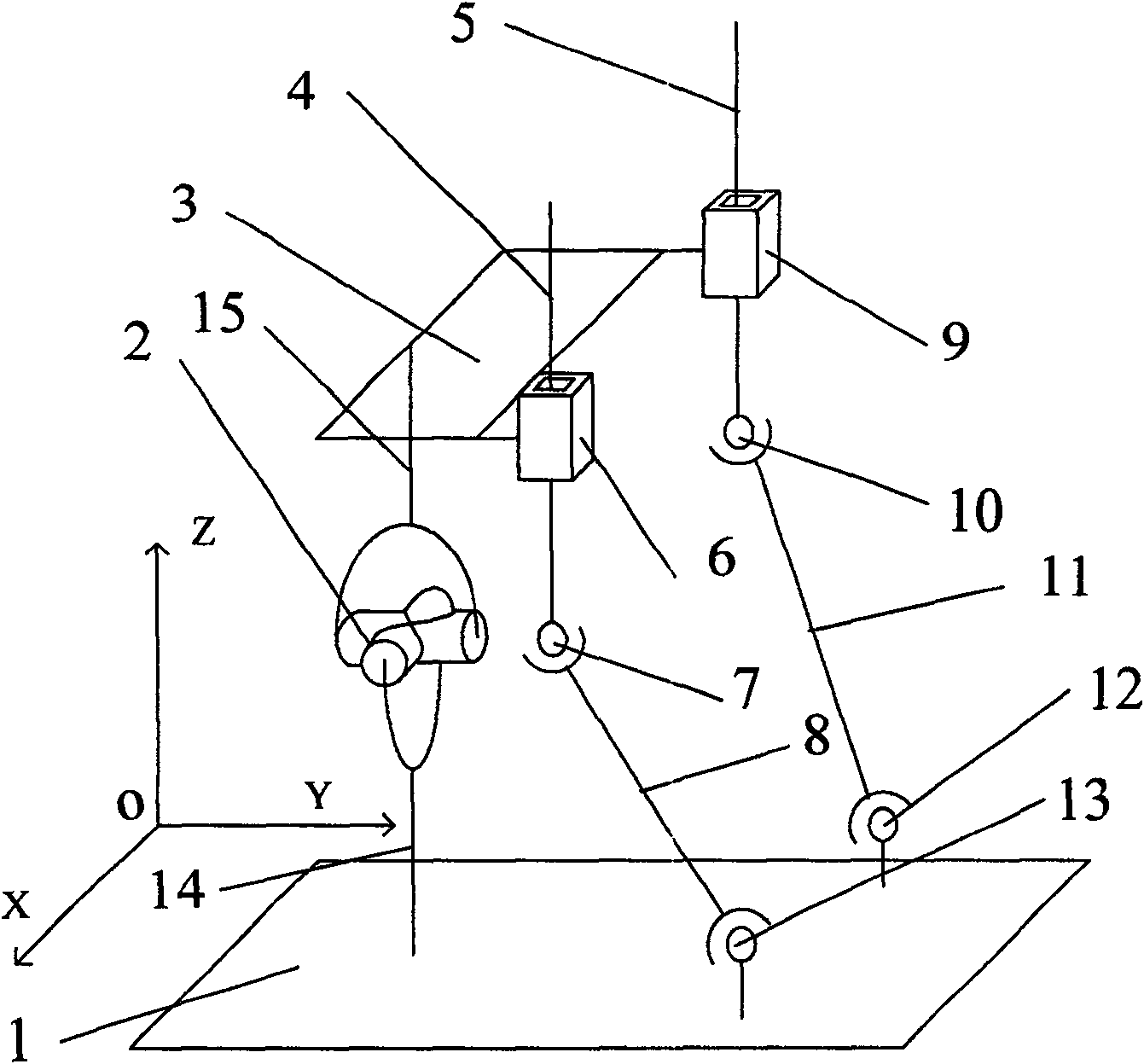
[0032] Combine figure 1 , This embodiment includes fixed platform 1, Hooke hinge 2, movable platform 3, sliding rods 4 and 5, movable pairs 6 and 9, connecting rods 8 and 11, as well as spherical pairs 6, 10, 12, 13, and vertical rods 14. And 15, there are two moving pairs 6 and 9 on the moving platform 3, which are connected to the fixed platform 1 through three branches; two of the three branches have the same structure, and one branch of the two same structural branches includes one The sliding rod 4 and a connecting rod 8, the sliding rod 4 and the moving platform 3 are connected by a moving pair 6, one end of the connecting rod 8 and the sliding rod 4 are connected by a spherical pair 7, and the other end of the connecting rod 8 is connected with the fixed platform 1 by a spherical pair 13 connection; the other branch of the two same structural branches includes a sliding rod 5 and a connecting rod 11. The sliding rod 5 and the moving platform 3 are connected by a moving pai...
Embodiment 2
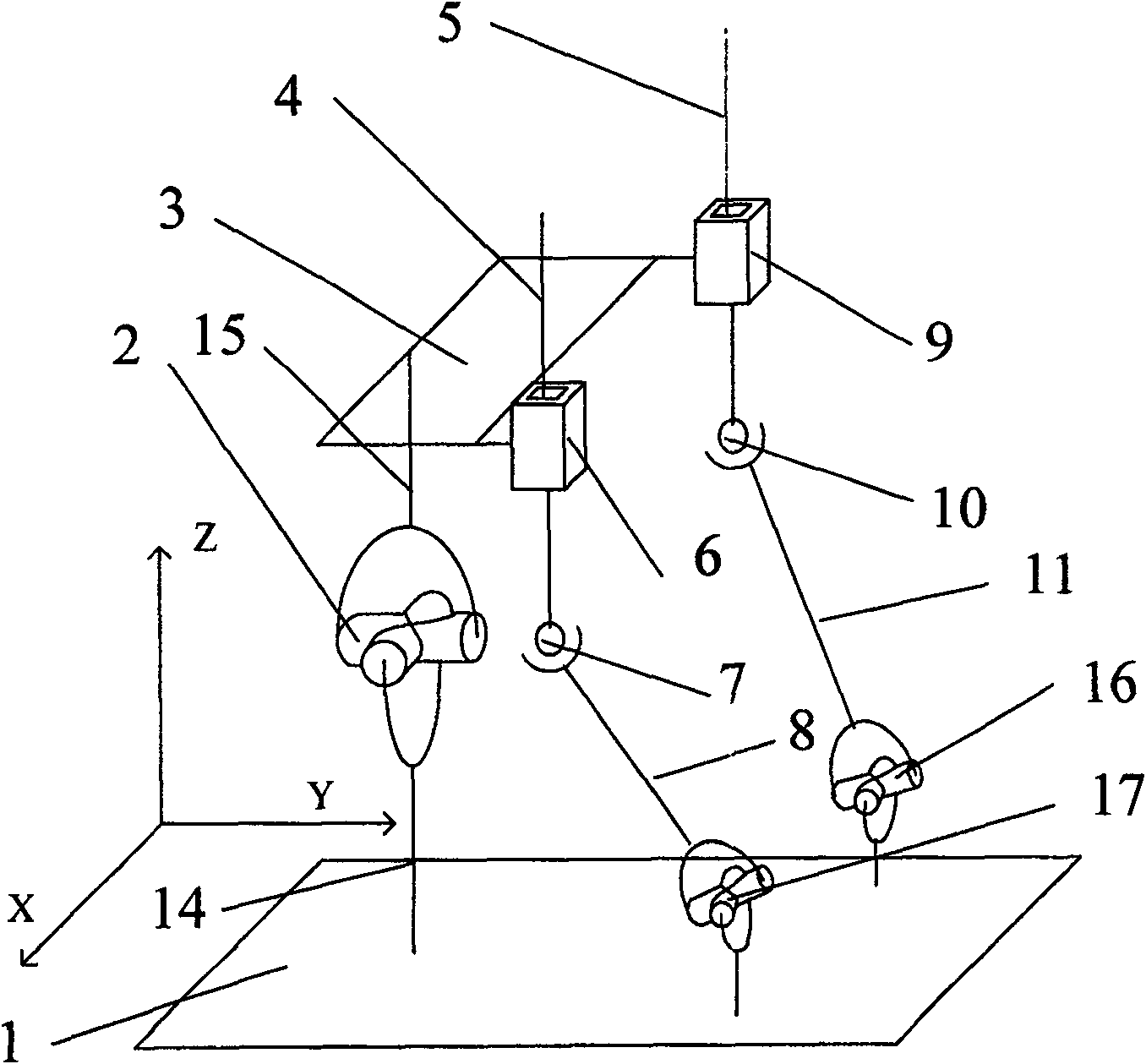
[0035] Combine figure 2 In this embodiment, the spherical pairs 12 and 13 connected between the connecting rods 8 and 11 and the fixed platform 1 in the embodiment 1 are replaced with Hooke hinges 17 and 16, and the other structures are the same as the embodiment 1.
Embodiment 3
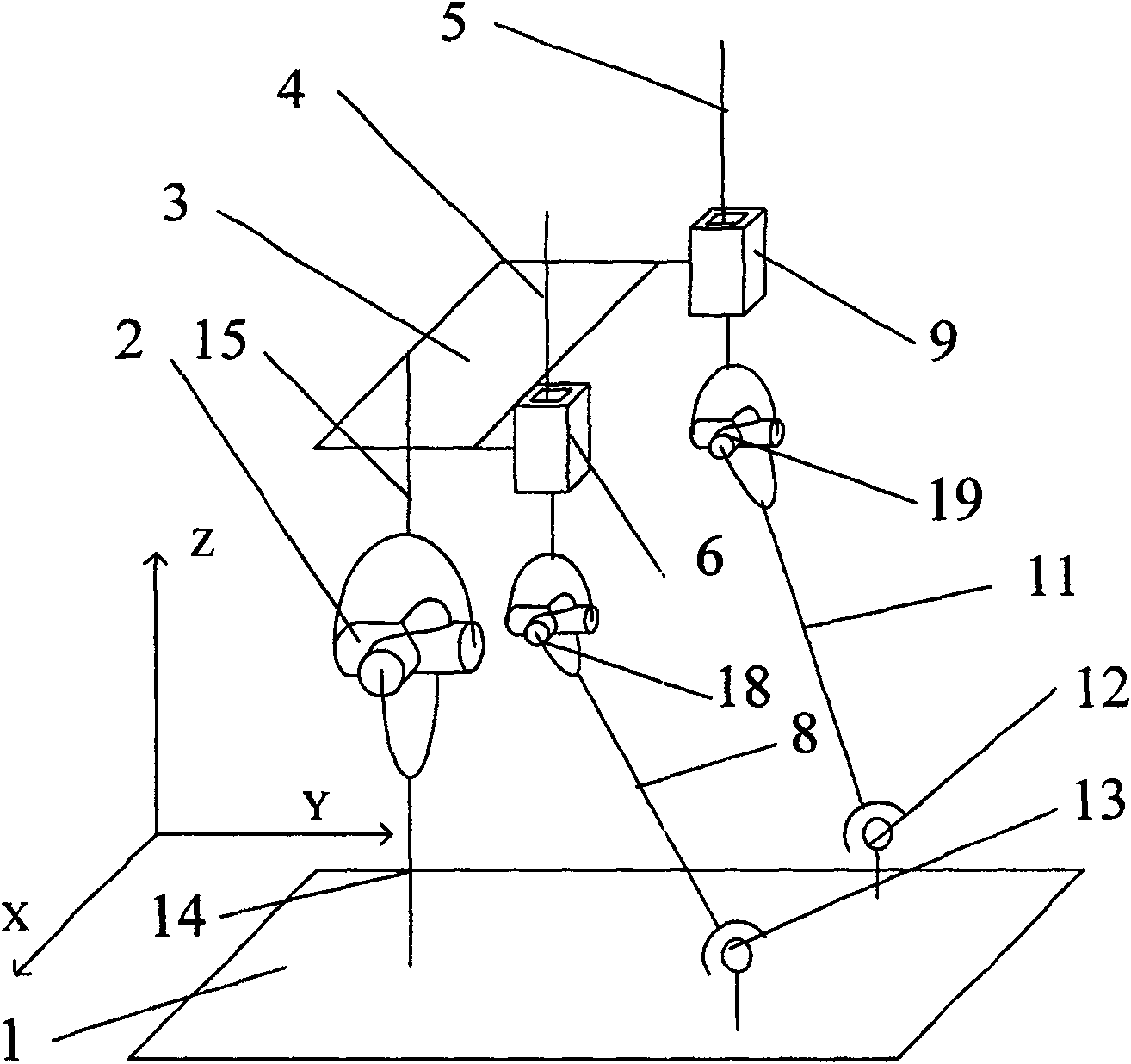
[0037] Combine image 3 In this embodiment, the spherical pairs 7 and 10 connected between the connecting rods 8 and 11 and the sliding rods 4 and 5 in the first embodiment are replaced with Hooke hinges 18 and 19, and the other structures are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com