Rehabilitation training robot for motion of single joint of hemiplegia patient
A rehabilitation training and robotics technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of single training method, limited joint range of motion, and no single-joint large-scale movement, so as to reduce the possibility of injury and avoid The effect of pulling or restraining
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
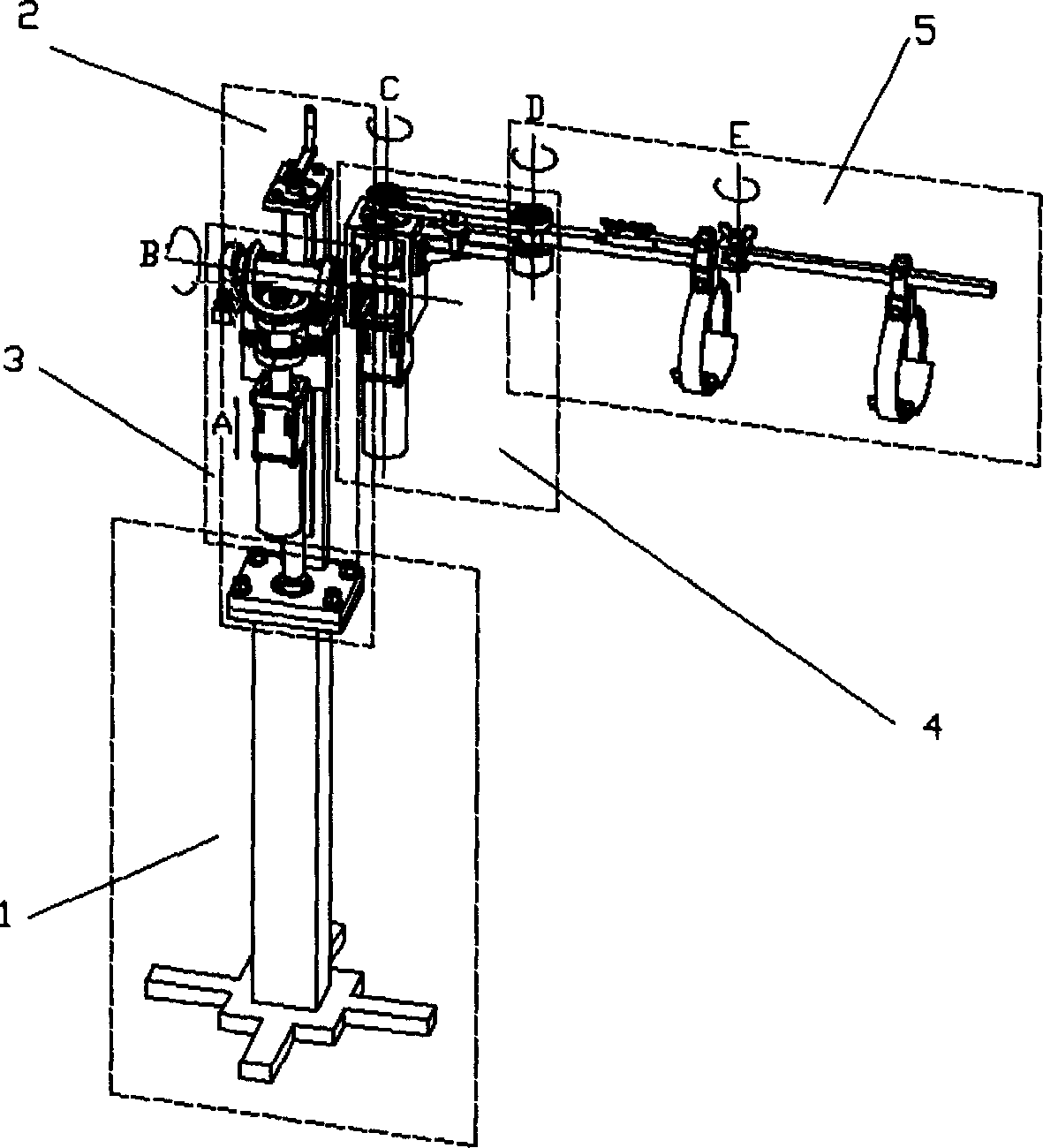
[0032] figure 1 Is the overall structure of the present invention. It can be seen that the present invention generally includes: a support device 2 fixed on the base 1; a first drive device 3 connected to the support device 2; a second drive device 4 connected to the first drive device 3; And an auxiliary arm device 5 connected to the second drive device 4 . Wherein the first driving device 3 can move up and down relative to the support device 2, as shown by arrow A in the figure; the second driving device 4 can rotate in a vertical plane relative to the first driving device 3, as shown by arrow B in the figure; The device 5 can rotate relative to the second driving device in a plane perpendicular to the rotation plane of the second driving device, as shown by arrow D in the figure. During the training, the patient's paralyzed limb is connected with the auxiliary arm device 5, and the rehabilitation training action of the paralyzed limb is realized under the assistance of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com