Calculation-based control system and method for forklift parking robot in free stop arm
A control system and robot technology, applied in the field of parking robots, can solve the problems that the vehicle cannot be squeezed onto the fork arm, and the vehicle is easy to slip, so as to achieve high feasibility and avoid the effect of falling off again
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
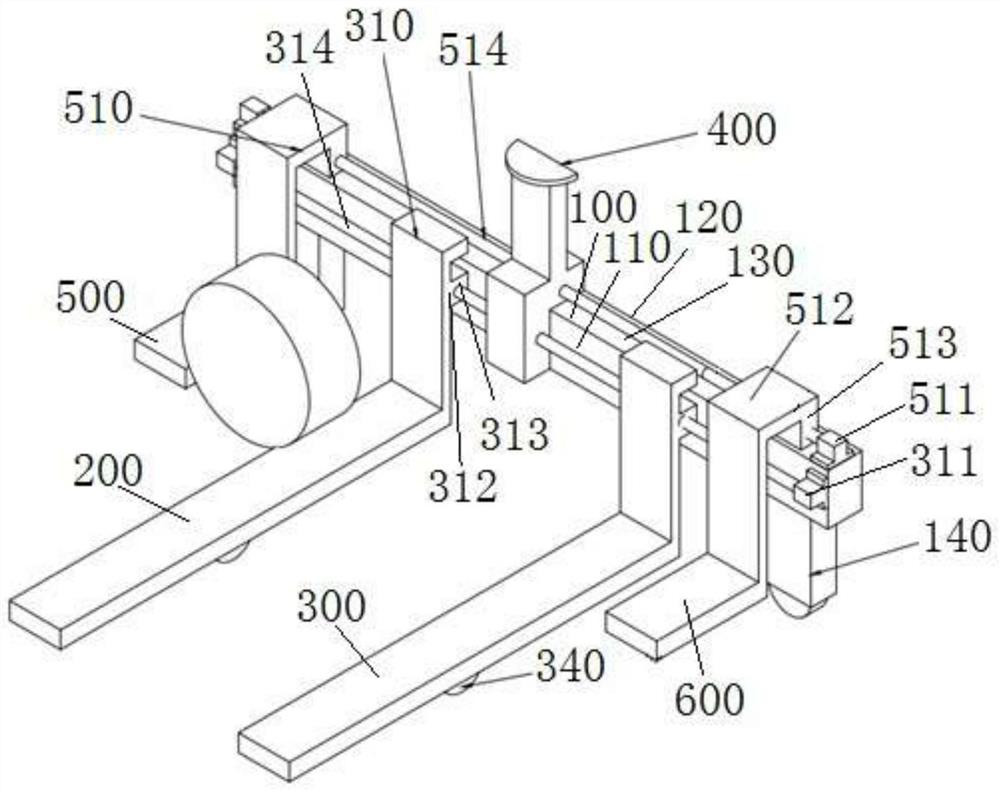
[0078] This embodiment relates to a double-tooth parking robot, such as figure 1 As shown, the robot includes:
[0079] The vehicle frame 100, the vehicle frame 100 has a straight structure;
[0080] Active running device 140, the active running device 140 is installed on the vehicle frame 100, and is used to drive the vehicle frame 100 to move;
[0081] The left fork arm 200 and the right fork arm 300 with the same symmetrical structure are installed on the same side of the vehicle frame 100 respectively, and the distance between them is adjustable;
[0082] Universal wheels, the universal wheels are installed on the left fork arm 200 and the right fork arm 300 to meet the driving requirements of the parking robot and serve as a supporting structure;
[0083]The left yoke 500 and the right yoke 600 with the same symmetrical structure, the left yoke 500 and the right yoke 600 are installed on the vehicle frame 100 and used in combination with the left yoke 200 and the right ...
Embodiment 2
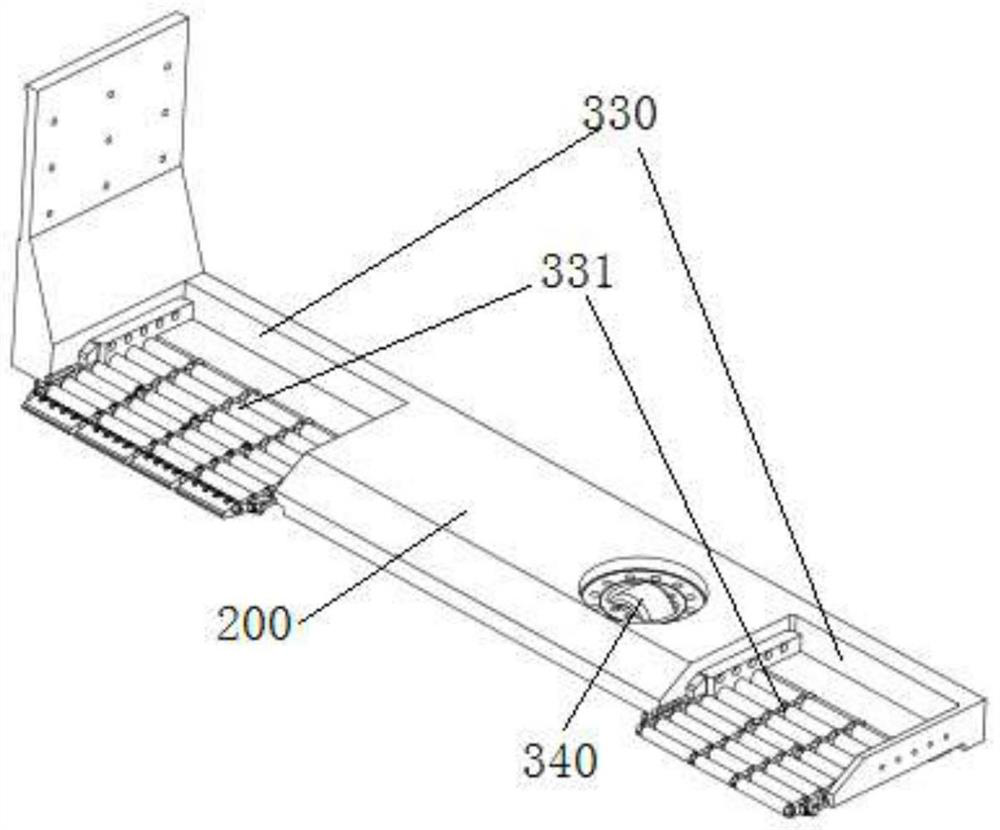
[0093] This embodiment relates to a double-tooth parking robot. This parking robot has a similar structure to the parking robot in Embodiment 1, only the structures of the left fork arm 200 and the right fork arm 300 are different. The fork arm of the parking robot is as Figure 2-4 shown.
[0094] like figure 2 , 3 As shown in and 4, the position corresponding to the tire of the left fork arm 200 and the right fork arm 300 is provided with a hub limiting seat 330, and a tire bracket 331 is installed in the hub limiting seat 330.
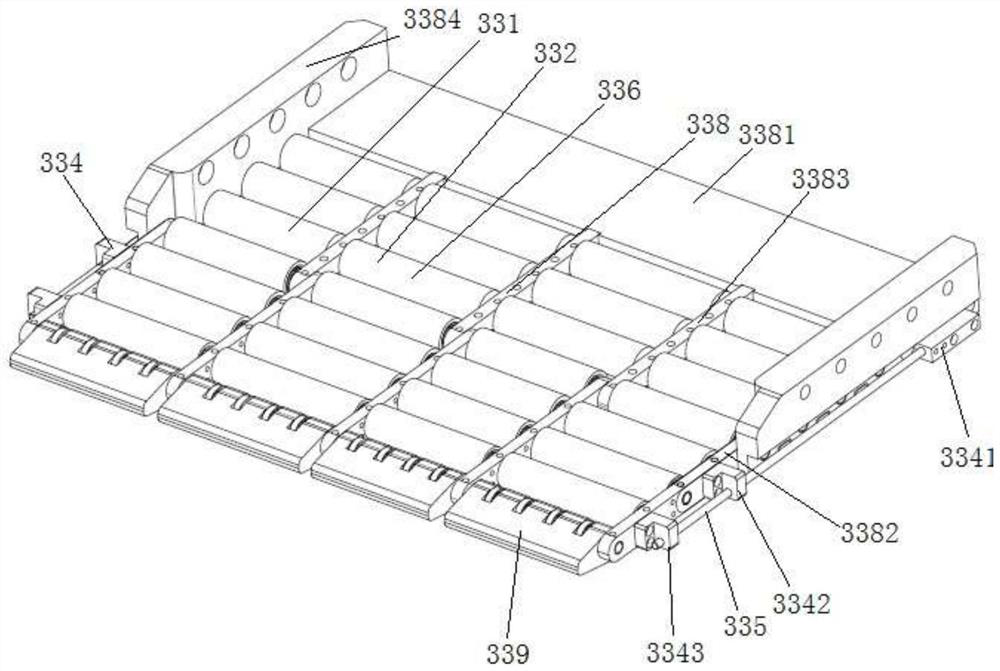
[0095] The tire bracket 331 includes a rolling assembly 332 , a fixing block 334 and a spring 335 . The rolling assembly 332 includes a rolling sleeve 336 , a roller shaft 337 and a shaft frame 338 . The rolling bushing 336 is sleeved on the roller shaft 337, and the roller shafts 337 are arranged in two or more rows and installed on the shaft frame 338. The shaft frame 338 includes a horizontal bracket 3381 , two first vertical brackets 3382...
Embodiment 3
[0099] In this embodiment, it involves a double-toothed parking robot, such as Figure 5 shown. The parking robot has a similar structure to the parking robot in Embodiment 1, only the lengths of the left arm 500 and the right arm 600 are different.
[0100] Wherein, the lengths of the left blocking arm 500 and the right blocking arm 600 are similar to the lengths of the left yoke 200 and the right yoke 300 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com