Synchronous double-direct-acting driving energy-adjustable continuous winged unmanned aerial vehicle
A continuous belt, unmanned aerial vehicle technology, applied in helicopters, unmanned aerial vehicles, fuselage and other directions, can solve the problem of inability to achieve vertical take-off and landing and hovering in the air, restricting the popular application of flapping-wing aircraft, and the overall situation of flapping-wing aircraft. Low efficiency and other problems, to achieve the effect of simple structure, low production cost and good mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
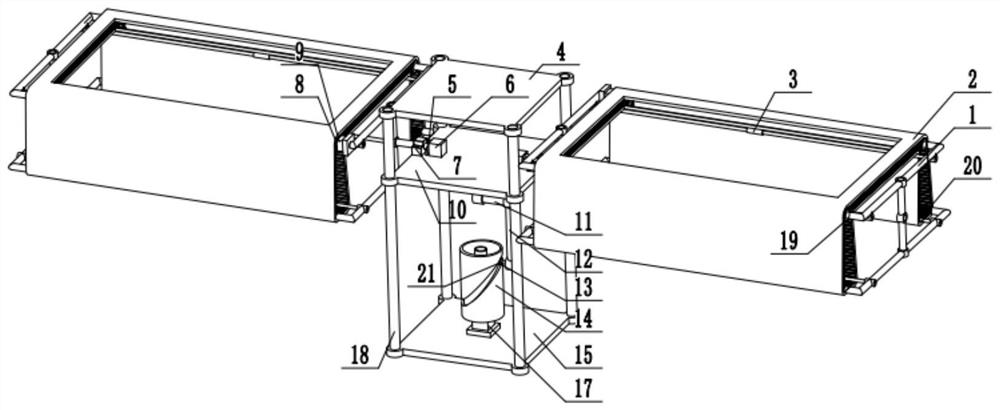
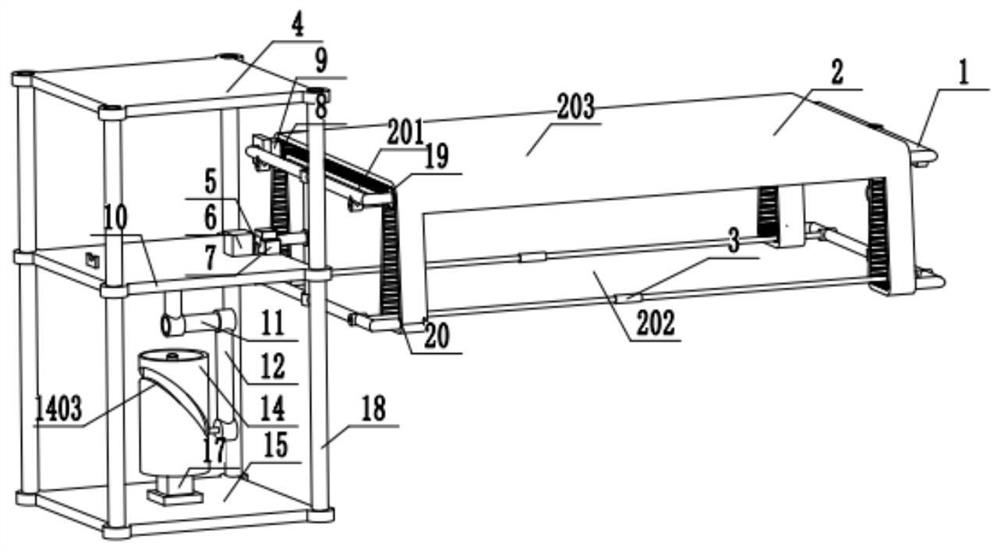
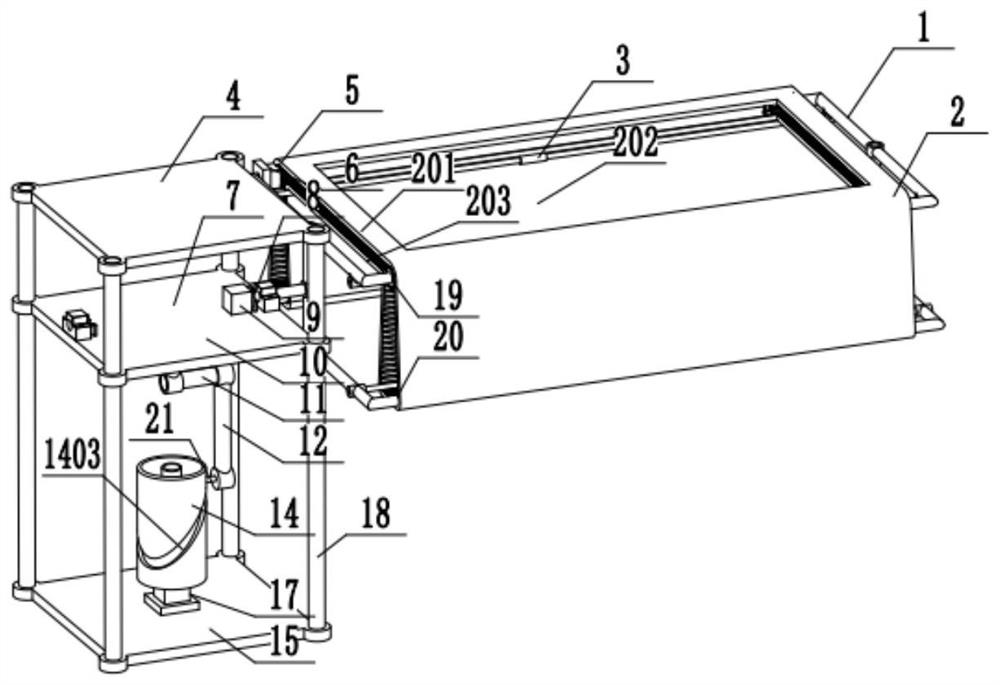
[0034] Example 1: Combining figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9 with Figure 10 , a high-voltage wire inspection drone that uses synchronous double direct drive energy-adjustable continuous winged drones. Including belt wings, fuselage top plate 4, first reducer 5, stepper motor 6, connector 7, second reducer 8, drive motor 9, transmission mechanism, fuselage bottom plate 15, third reducer 16, motor 17 And the slideway 18, the fuselage roof 4 is symmetrically installed and fixed with four vertical slideways 18, the two connecting parts 7 are fixedly connected to the push rod 10 respectively, and the two belt wings are respectively connected to the two connecting parts 7 and can be relatively rotated, the wing includes a winged frame 1, and a continuous soft belt 2 sleeved on the winged frame 1, the winged frame 1 is also provided with a driving motor 9 and a second speed reducer 8, the driving motor 9...
Embodiment 2
[0035] Example 2: Combining figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9 with Figure 10 , a high-rise building fire-fighting drone that adopts synchronous double direct drive energy-adjustable continuous winged drone. Including belt wings, fuselage top plate 4, first reducer 5, stepper motor 6, connector 7, second reducer 8, drive motor 9, transmission mechanism, fuselage bottom plate 15, third reducer 16, motor 17 And the slideway 18, the fuselage roof 4 is symmetrically installed and fixed with four vertical slideways 18, the two connecting parts 7 are fixedly connected to the push rod 10 respectively, and the two belt wings are respectively connected to the two connecting parts 7 and can be relatively rotated, the wing includes a winged frame 1, and a continuous soft belt 2 sleeved on the winged frame 1, the winged frame 1 is also provided with a driving motor 9 and a second speed reducer 8, the driving mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com