Method and device for tracing positioning error of pipeline robot
A pipeline robot and positioning error technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of calibration and measurement technology gaps, and achieve the effects of enhancing comparability, improving accuracy, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In the following, the present invention will be further described in detail in conjunction with the embodiments, so as to make the purpose, technical solutions and advantages of the present invention more clearly understood. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0023] According to the method for tracing the source of a pipeline robot positioning error according to the first exemplary embodiment of the present invention, the method in this embodiment mainly includes the following steps.
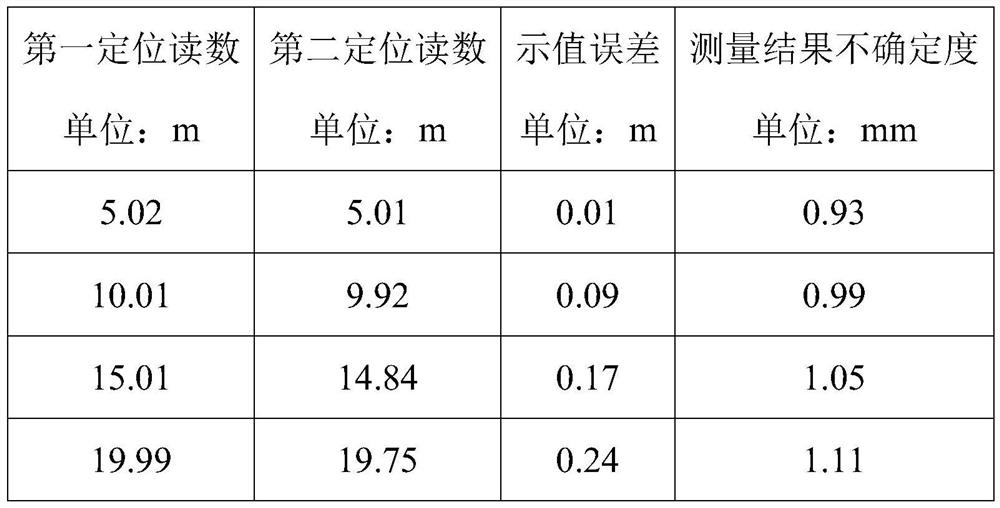
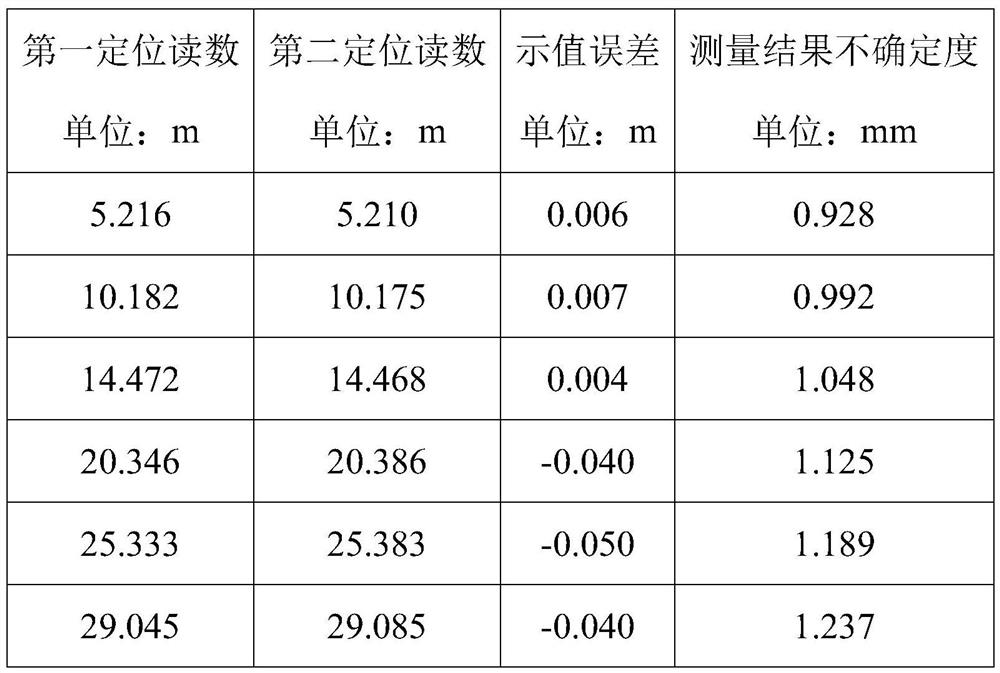
[0024] Step 1: Control the pipeline robot to maintain the first state on the traceability workbench, and obtain the first positioning reading through the first measuring device
[0025] The positioning error of the pipeline robot can be calibrated by the static distance error, and can further be calibrated by the static angle error and other precision errors. The first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com