Method and system for improving elevator taking efficiency of robot, electronic equipment and medium
A robot and efficient technology, applied in the field of robots, can solve the problems of elevator equipment damage, accelerated expiration of elevator service life, and high algorithm cost, saving time, improving elevator efficiency, and saving algorithm cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
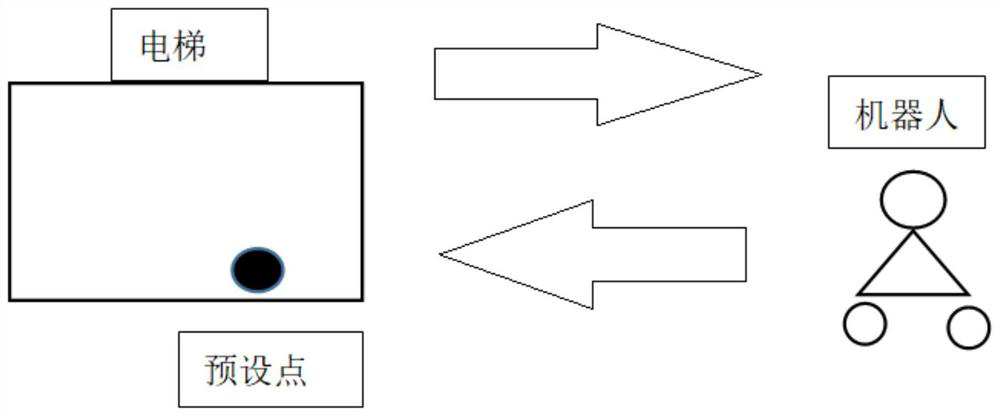
[0025] Embodiment 1: The present invention proposes a method for improving the efficiency of a robot taking an elevator, which is executed by a robot, and includes the following steps: after arriving at the entry point and having the qualification for entering the elevator, send an entry request to the elevator, and receive the preset point information sent by the elevator , after performing the operation of reaching the preset point according to the received preset point information, send the preset point arrival notification to the elevator, execute the robot turning 180 degrees, receive the elevator door opened notification sent by the elevator, and execute it facing the elevator door Elevator exit operation is completed.
[0026] As a preferred embodiment, the turning action of the robot is performed simultaneously with the closing operation of the elevator door by the elevator.
Embodiment 2
[0027] Embodiment 2: The present invention also proposes a method for improving the efficiency of the robot's elevator ride, which is executed by the elevator, including the following steps: in response to the request for entering the elevator sent by the robot, sending the preset point information of the elevator room to the robot; receiving the robot's sent Arrival notification at the preset point of the elevator door, execute the elevator door closing operation, and go to the destination floor, execute the elevator door opening operation after arriving at the destination floor, and send the elevator door opened notification to the robot.
[0028] As a preferred embodiment, the turning action of the robot is performed simultaneously with the closing operation of the elevator door by the elevator.
Embodiment 3
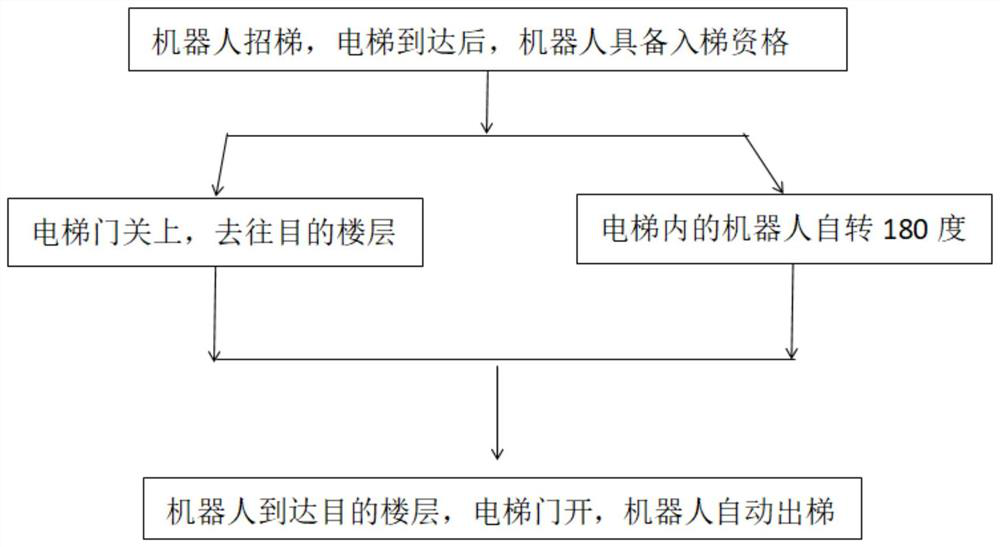
[0029] Embodiment 3: as figure 2 As shown, the present invention also proposes a method for improving the efficiency of a robot taking a ladder, comprising the steps of:
[0030] Step SS1: After the robot arrives at the entry point and has the entry qualification, it sends an entry request to the elevator, and the elevator receives the entry request sent by the robot, and sends the preset point information of the elevator room to the robot;
[0031] Step SS2: The robot receives the preset point information sent by the elevator, and after performing the operation of arriving at the preset point according to the received preset point information, sends a preset point arrival notification to the elevator;
[0032] Step SS3: The elevator receives the notification of arrival at the preset point sent by the robot, executes the operation of closing the elevator door, and goes to the destination floor. The robot performs a 180-degree turn of the robot. notify the robot;
[0033] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com