Method, device, electronic device and storage medium for robot elevator control
A control method and technology of electronic equipment, applied in the fields of electronic equipment and storage media, robot elevator control methods, and devices, can solve problems such as low working efficiency of elevators and robots, and achieve the effect of improving elevator riding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
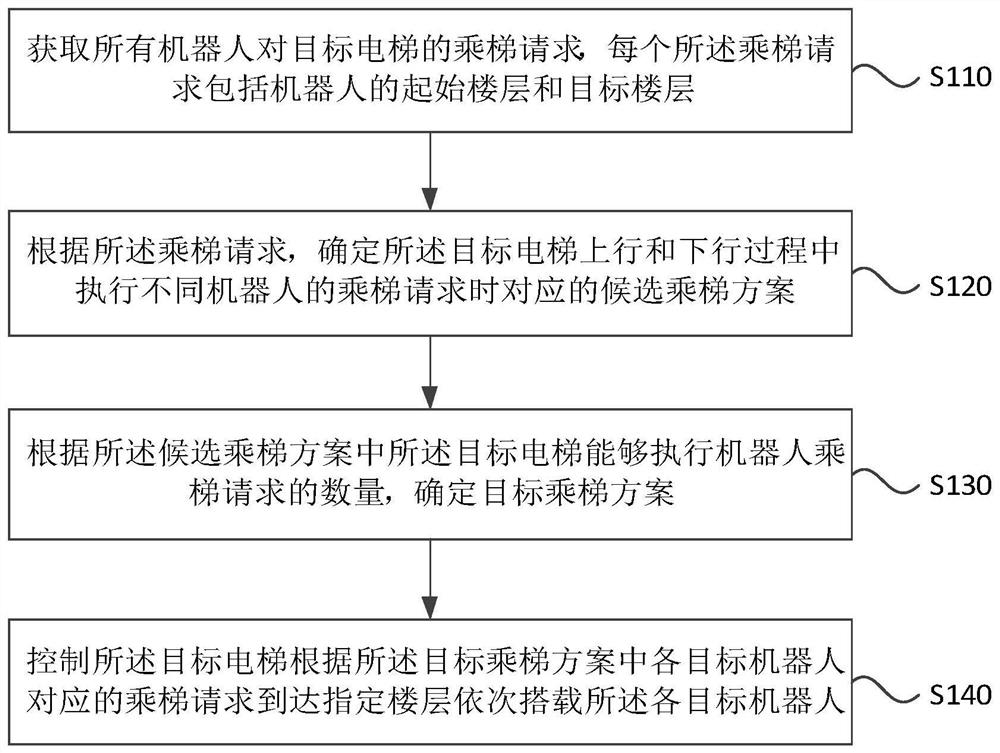
[0027] figure 1 It is a flow chart of a robot elevator control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where multiple robots request to ride an elevator at the same time. This method can be executed by a robot elevator control device. The device can be realized by software and / or hardware.
[0028] In order to clearly describe the technical solutions in the various embodiments of the present application, the robot elevator system involved in the embodiments of the present application will be described first.
[0029] The robot elevator system in this embodiment may include a background dispatching system, a robot, an elevator, and an elevator controller. Among them, the robot and the elevator controller can be connected to the background dispatching system by wired or wireless means, the robot can send its own status information and elevator request to the background server, and the elevator controller can also ...
Embodiment 2
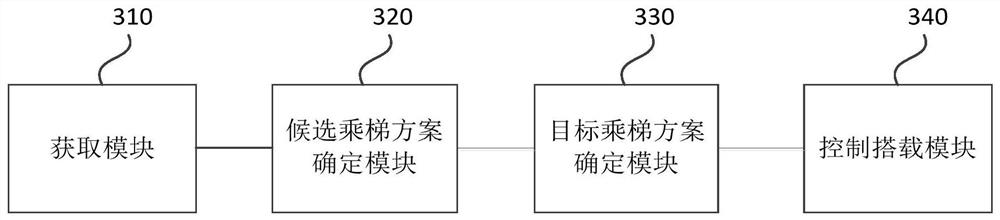
[0059] image 3 It is a structural schematic diagram of a robot elevator control device provided in Embodiment 2 of the present invention. The robot elevator control device provided in the embodiment of the present invention can execute a robot elevator control method provided in any embodiment of the present invention. . see image 3 , the device consists of:
[0060] An acquisition module 310 , a candidate ride plan determination module 320 , a target ride plan determination module 330 and a control carrying module 340 .
[0061] Wherein, the obtaining module 310 is used to obtain all the robot's ride requests to the target elevator, each of which includes the starting floor and the target floor of the robot;
[0062] Candidate ride plan determination module 320, used to determine the corresponding candidate ride plan when executing the ride requests of different robots during the upward and downward processes of the target elevator according to the ride request;
[0063...
Embodiment 3
[0077] Figure 4 It is a schematic structural diagram of an electronic device provided by Embodiment 3 of the present invention. Figure 4 A block diagram of an exemplary electronic device 12 suitable for use in implementing embodiments of the invention is shown. Figure 4 The electronic device 12 shown is only an example, and should not limit the functions and scope of use of the embodiments of the present invention.
[0078] Such as Figure 4 As shown, electronic device 12 takes the form of a general-purpose computing device. Components of electronic device 12 may include, but are not limited to, one or more processors or processing units 16, system memory 28, bus 18 connecting various system components including system memory 28 and processing unit 16.
[0079] Bus 18 represents one or more of several types of bus structures, including a memory bus or memory controller, a peripheral bus, an accelerated graphics port, a processor, or a local bus using any of a variety of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com