Indoor SLAM mapping method based on 3D laser radar and UWB
A laser radar and 3D technology, applied in 3D modeling, image enhancement, image analysis, etc., can solve problems such as the inability to eliminate SLAM cumulative errors, visual camera limitations, etc., to save manpower and time, improve positioning accuracy and robustness , to avoid the effect of manual measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The present invention will be further described below in conjunction with specific embodiment:
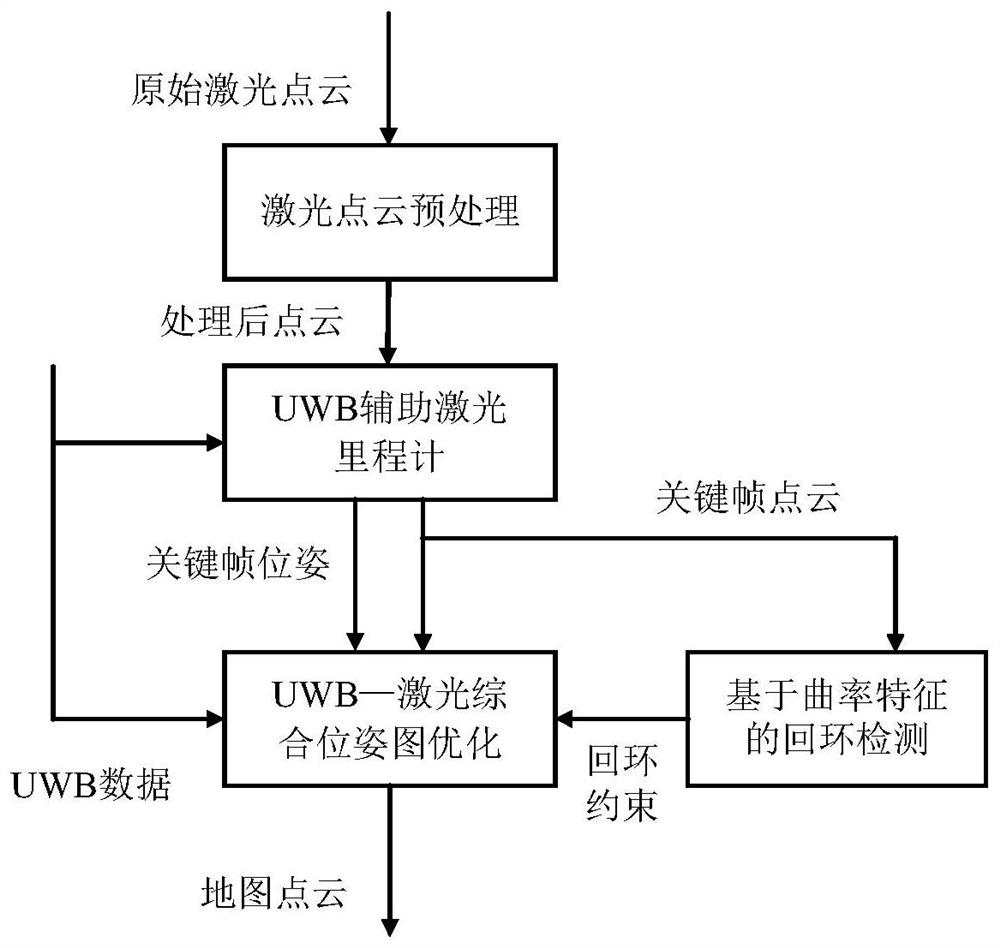
[0098] like figure 1 As shown, in the indoor SLAM mapping method based on 3D lidar and UWB described in this embodiment, a UWB positioning system is deployed in an indoor scene, and a robot carrying a 3D lidar sensor is used to explore the indoor scene area. The SLAM algorithm of lidar data and UWB data generates a map of the explored area;
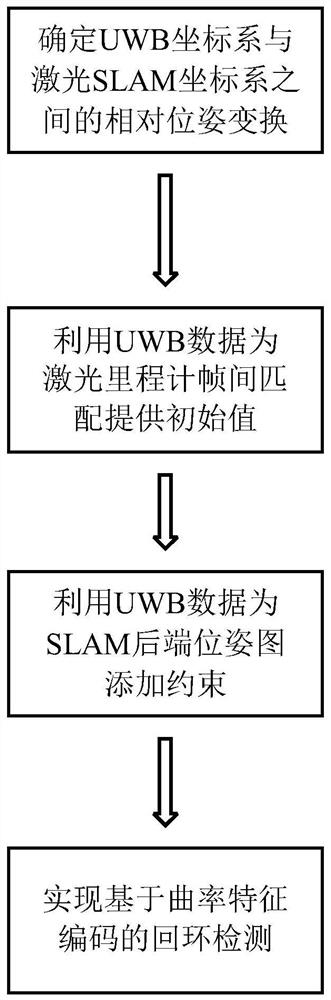
[0099] Specifically include the following steps:
[0100] S1. Determine the relative pose transformation between the 3D laser SLAM coordinate system and the UWB positioning coordinate system;
[0101]In this embodiment, a UWB positioning system is deployed in an indoor scene, and a human or robot carrying a 3D lidar sensor is used to explore the indoor area, and a map of the explored area is generated using a SLAM algorithm that fuses lidar data and UWB data.
[0102] In the UWB positioning system used, there are multiple sensor node...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com