CAV lane changing decision-making method for off-ramp diversion area of expressway based on automatic driving special lane deployment scene
A technology for autonomous driving and dedicated lanes, which is applied in the field of intelligent transportation and can solve the problems of unclear safety characteristics of mixed traffic flow.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
[0049] Lane Change Decision Making Based on autopilot lane freeway off-ramp deployment scenario shunt region CAV, comprising the steps of:
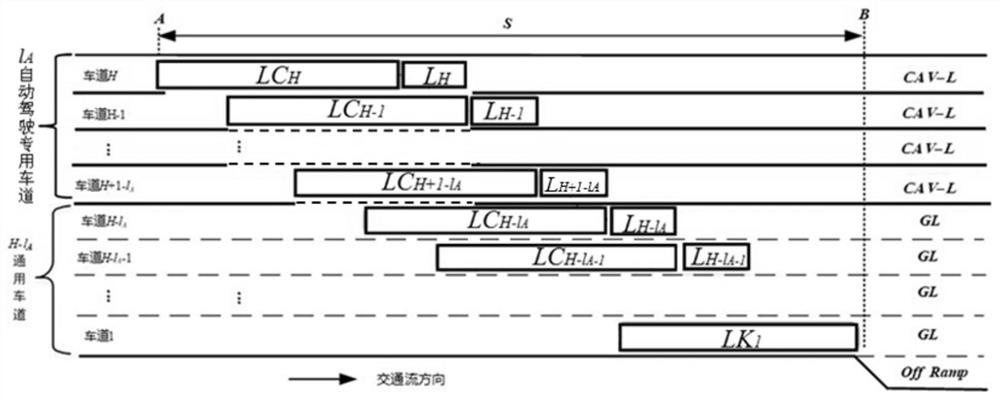
[0050] S10, constructed in the highway lane of the special autopilot CAV forced commutation channel region split off ramp scene: as figure 1 , The total number of lanes of the highway lane H, H≥4, lane farthest from the off ramp of l A Article autopilot lane (CAV-L), l A = 1,2 ... H-1; article 1 of the automatic driving lane to lane H, the l A Article automatic driving lane as the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com