Vehicle obstacle avoidance method based on binocular vision and deep learning and electronic equipment
A deep learning and binocular vision technology, applied in the field of computer vision, can solve the problems of mislocation of obstacles, poor generalization, easy to be interfered by noise, etc., to achieve the effect of increasing detection ability, good drivability, and reducing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0069] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
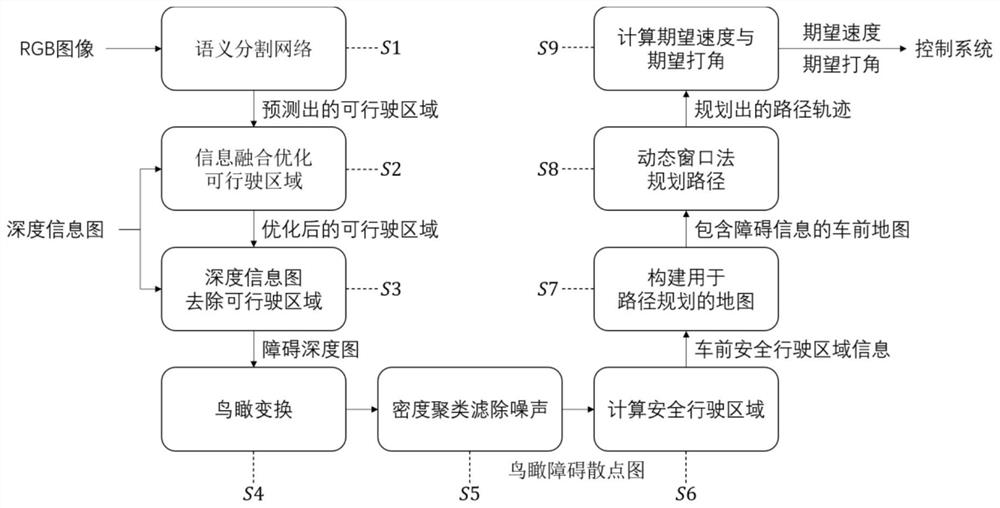
[0070] Such as figure 1 As shown, the present invention discloses a vehicle obstacle avoidance method based on binocular vision and deep learning, including:
[0071] (1) Obtain the RGB image of a certain field of view (for example, 90° horizontally and 60° vertically) in front of the vehicle:
[0072] Specifically, ZED cameras can be used to continuously acquire video streams, and single-fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com