Wearable lower extremity exoskeleton robot based on tether-driven redundant flexible actuators
An exoskeleton robot and flexible driver technology, applied in the field of robotics, can solve problems such as the hidden danger of rigid transmission safety, and achieve the effects of portability, high rigidity and simple structure of the overall material
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
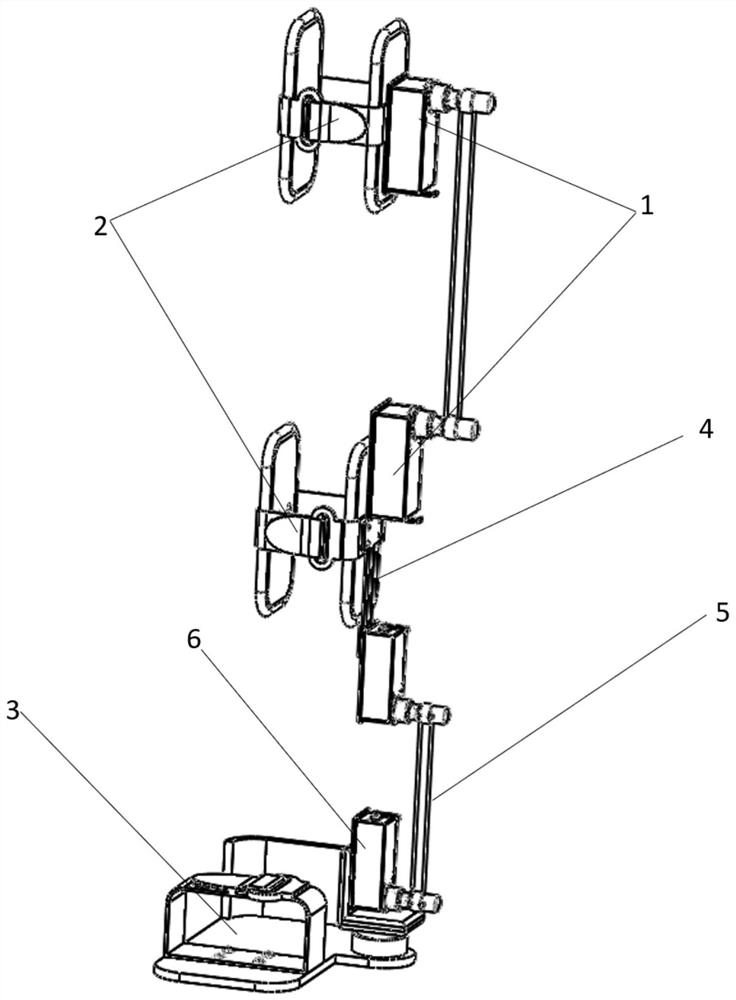
[0020] like figure 1 As shown, a wearable lower extremity exoskeleton robot based on redundant rope-driven flexible drives includes two sets of leg exoskeleton structures symmetrically arranged on the left leg and right leg; the two sets of leg exoskeleton structures are identical and include two super Input a flexible driver 1, two bandage structures 2 and a foot plate 3; each super-input flexible driver includes a group of flexible drivers 6 connected by a rope 5; then two groups of flexible drivers 6 are connected by a mechanical connection device 4; a The bandage structure is connected with a group of flexible drivers, and the other bandage structure is connected with a mechanical connection device; the sole of the foot is connected with another group of flexible drivers through an adapter bracket.
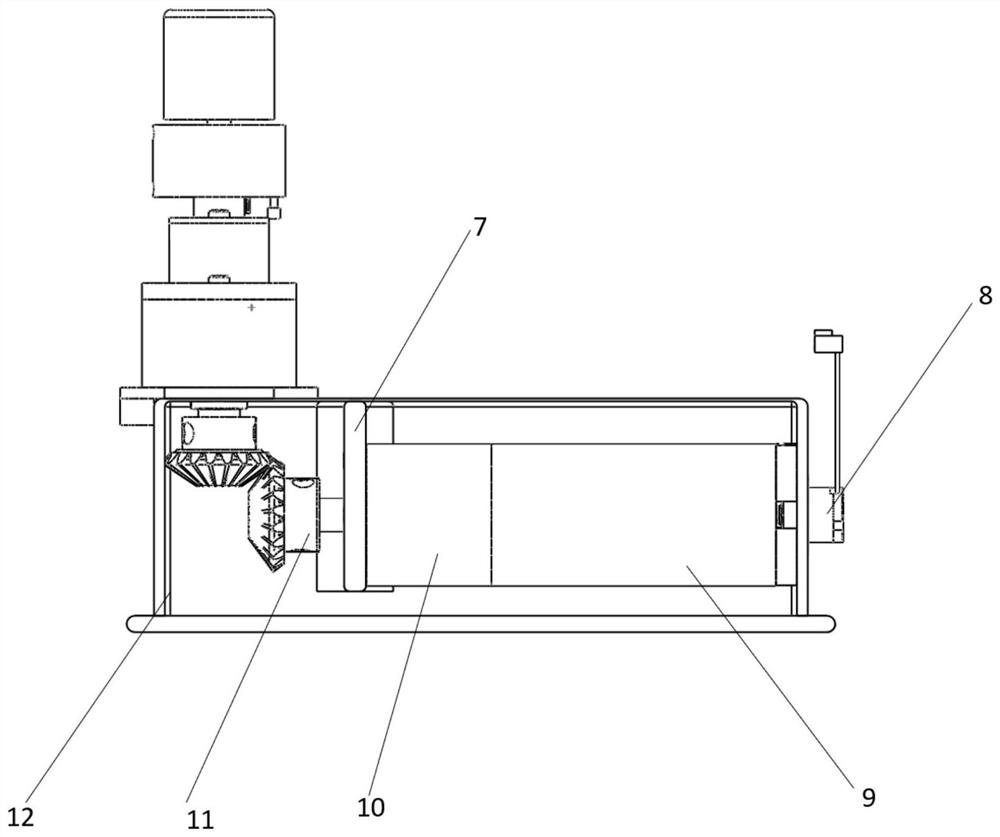
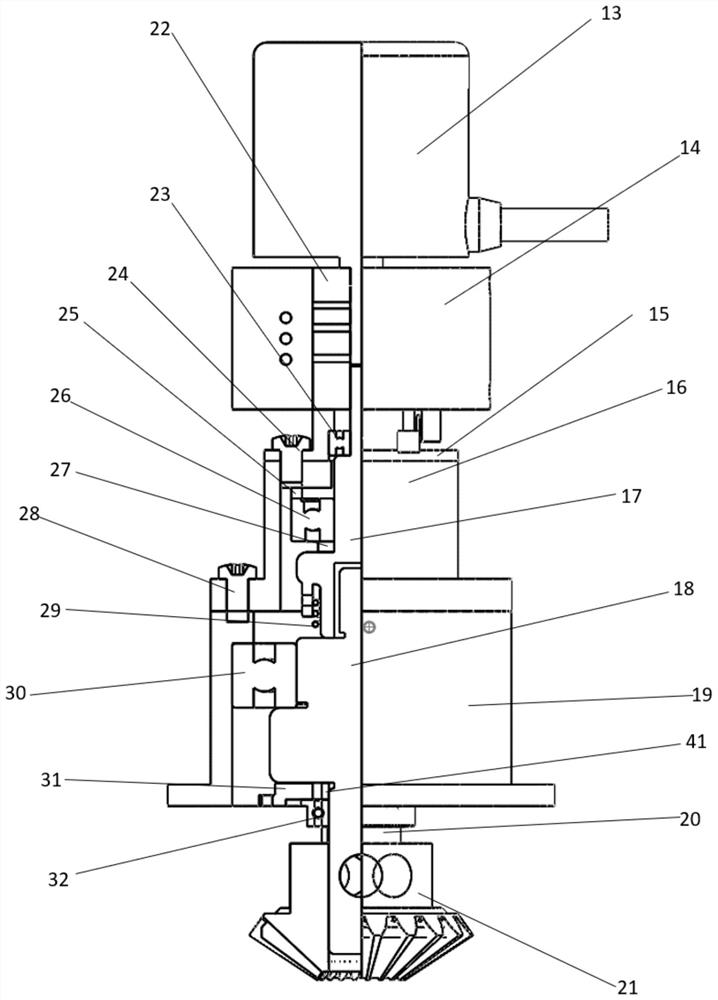
[0021] like figure 2 and image 3 As shown, the flexible driver includes a motor housing 12, a motor 10, a gearbox 9, a first encoder 8, a motor fixing device 7, a second e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com