A multi-task control method for redundant manipulator based on multi-layer structure
A multi-layer structure and control method technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as uncontrollable, low calculation accuracy, and insufficient real-time performance, and achieve high-precision and real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
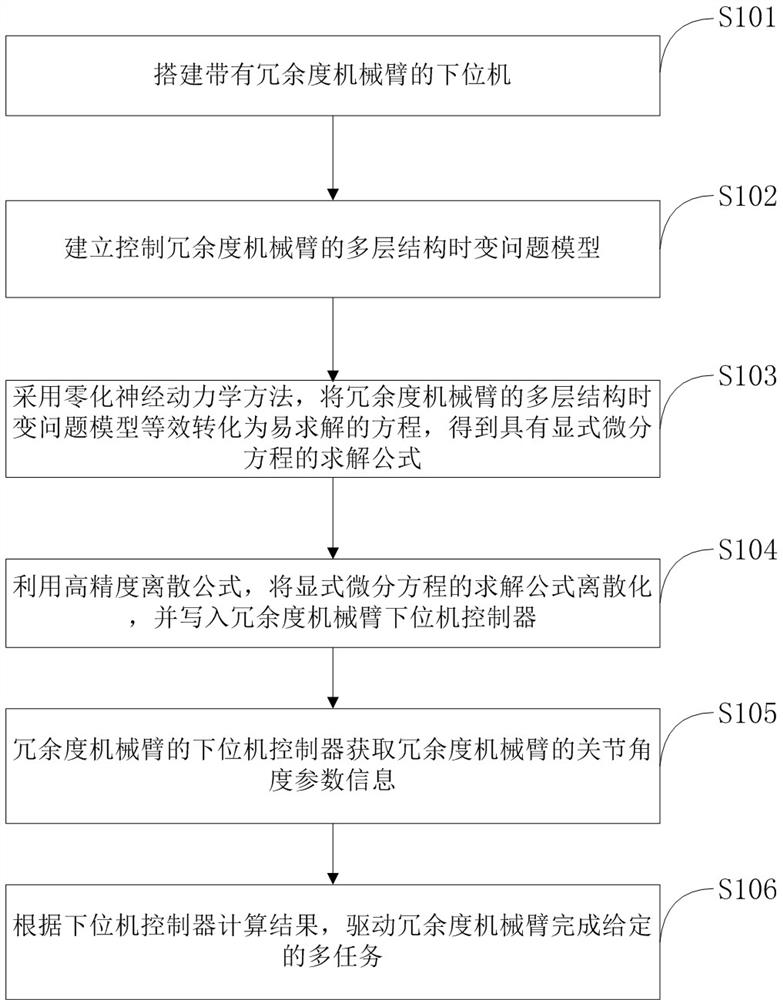
[0045] Such as figure 1 Shown flow chart, a kind of multi-task control method of redundant manipulator based on multilayer structure of the present invention, comprises the following steps:
[0046] S101: Build a lower computer with a redundant robotic arm.
[0047] S102: Establish a multi-layer structure time-varying problem model for controlling the redundant manipulator.
[0048] The multilayer structure time-varying problem model of the present invention is divided into four layers, wherein the first layer structure adopts the time-varying nonlinear equation equation, which is used to describe the tracking task of the redundant mechanical arm; the time-varying nonlinearity of the first layer structure, etc. The equation is as follows:
[0049] f(θ(t))-r d (t)=0, formula (1)
[0050] Among them, t is the time, θ(t) is the joint angle vector of the redundant manipulator, f( ) is the nonlinear forward kinematics mapping of the redundant manipulator, r d (t) is the time-v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com