A Coordinated Control Method for Dual-arm Space Robots Based on Mixed Task Priority
A space robot, task priority technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of low-level task failure, system singularity, etc., to avoid algorithm singularity and improve control performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
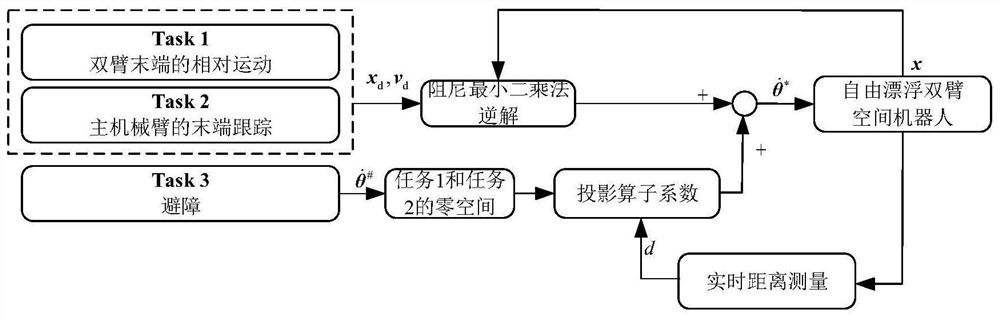
[0177] A method for coordinated control of a dual-arm space robot based on mixed task priority, comprising the following steps:
[0178] Step 1: Set the three tasks of the dual-arm space robot system, and set the order of priority from high to low: Task 1: Coordinated movement at the end of the dual arm; Task 2: Trajectory tracking at the end of the main arm and the task 3: Avoid obstacles;
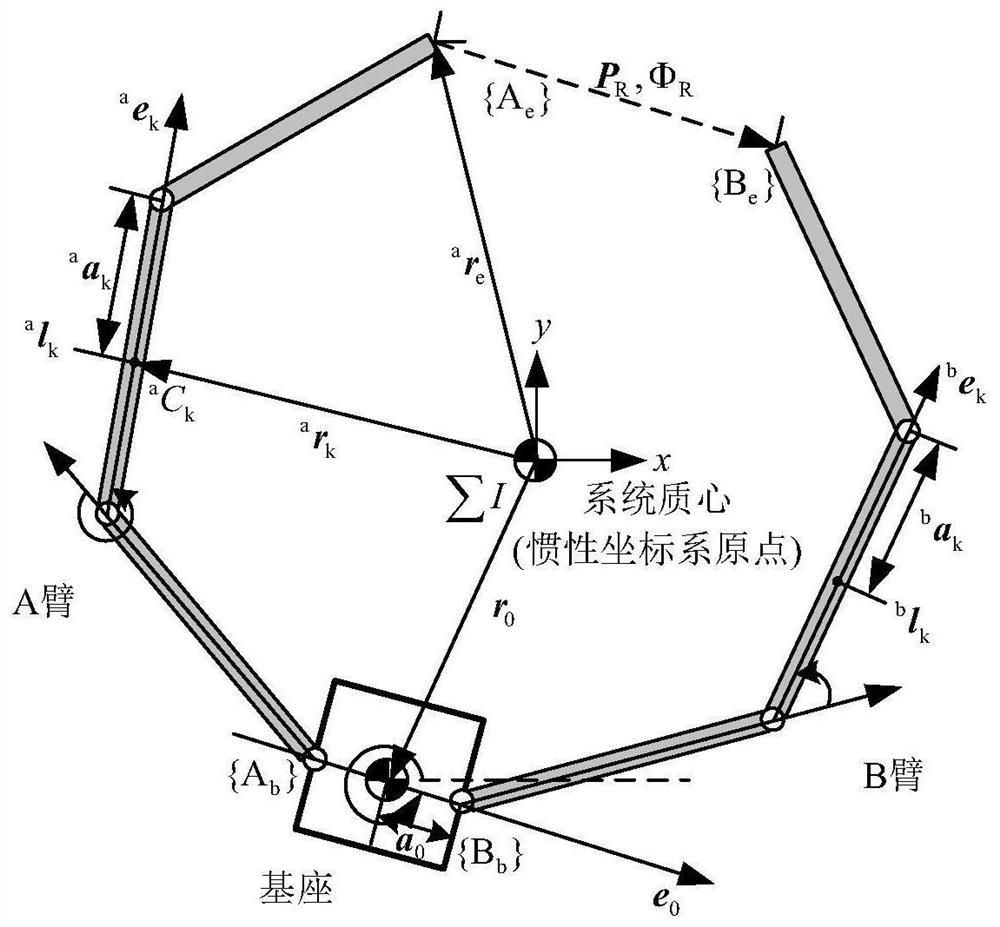
[0179] Step 2: Combine figure 2 , according to the coupling effect between the base and the manipulator, construct the kinematics model of the dual-arm space robot, which specifically includes the following steps:
[0180] Step 2-1: Determine the center of mass of the dual-arm space robot system:
[0181]
[0182] Among them, r 0 is the position of the center of mass of the robot base in the inertial coordinate system; n a , n b Respectively, the number of connecting rods of robot A arm and B arm; m 0 is the mass of the base; a m k , b m k are the mass of the kth connecting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com