Overall homeward voyage path planning method and planning system, storage medium and unmanned aerial vehicle
A return-to-home path and planning system technology, which is used in control/adjustment systems, three-dimensional position/channel control, vehicle position/route/altitude control, etc. problems, to achieve high real-time and security, high practical significance, and optimal strategies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
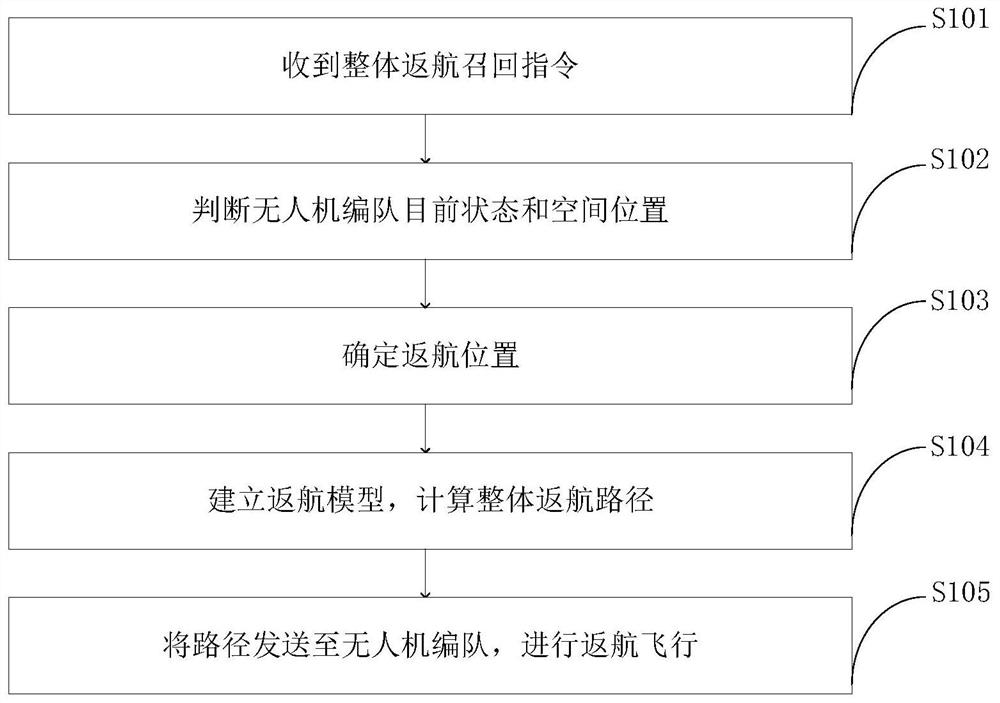
[0113]An overall return path planning method of drone aquators, including the following specific steps:
[0114]Step 1: Receive the overall return recall directive;
[0115]Step 2: Judging the current state and spatial position of the drone aquame;
[0116]Step 3: Determine the return location;
[0117]Step 4: Calculate the overall return path;
[0118]Step 5: Send the path to the drone block and return flight.
Embodiment 2
[0120]The establishment of the return model includes:
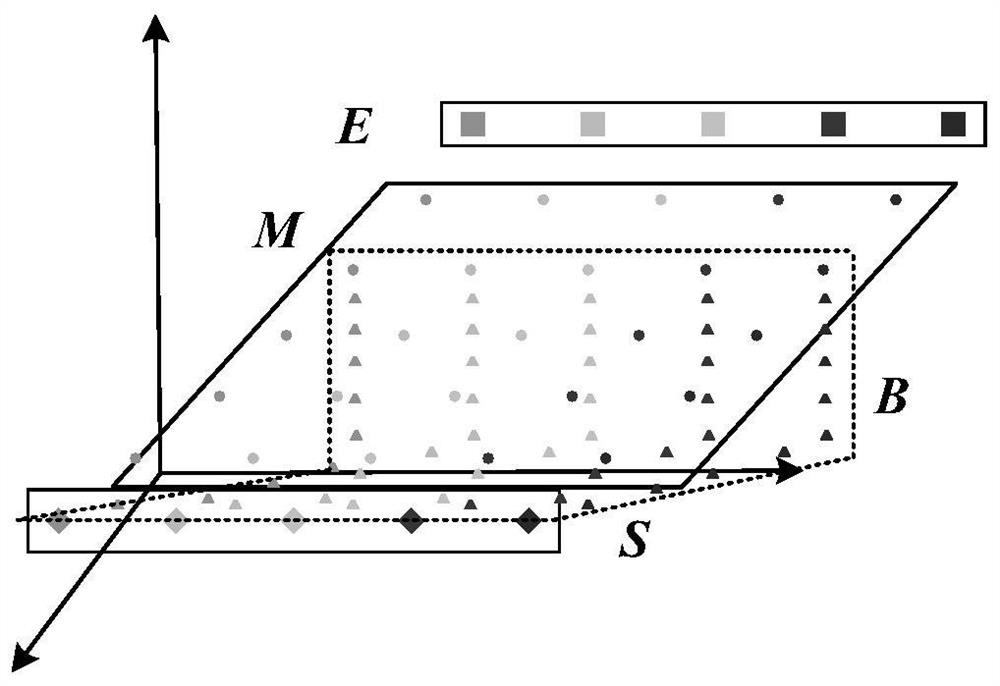
[0121]Create a spatial right coordinate system W. Three axes of WWYW,zWPoint to east, south and sky; the offset position in the space is expressed as (x, y, z), and the unit is m.
[0122]Assuming a total of N rack drones, the initial formation position of the drone block is expressed as:
[0123]S = [s1, S2, S3, ..., sn];
[0124]The end point of the drone format is expressed as:
[0125]E = [e1, E2, E3, ..., en];
[0126]The unmanned team is expressed as the formation of a certain time t
[0127]Mt= [Mt1, Mt2, Mt3, ..., MTN ];
[0128]Where Sn, En, MTN All are the location points in W.
[0129]As a result, the goal of the drone packet is: the formation is changed from S to E.
[0130]Assuming a total of P paths is planned in the entire formal change. The path of the drones in the process can be expressed as:
[0131]
[0132]When the drone packet needs to return overall, it is necessary to plan all drones from the current state. If the time t starts to plan a d...
Embodiment 3
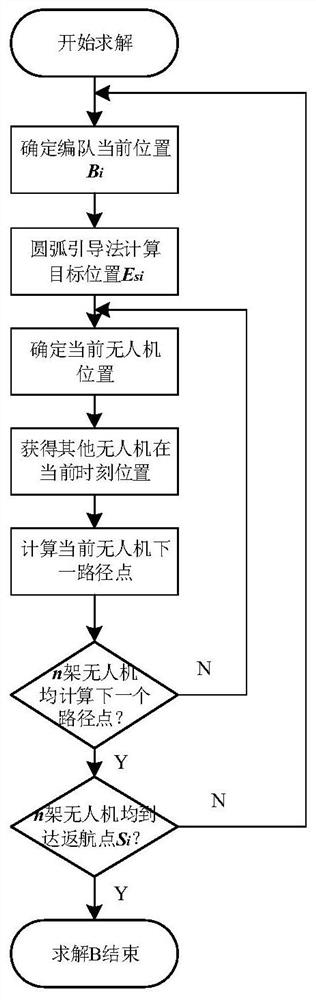
[0135]The path calculation method is:
[0136](1) Determine the current position of the drone packet Bi;
[0137](2) Calculate the current drone arc boot target point position ESi;
[0138](3) Calculate the next path;
[0139](4) Repeat (2-3) until the N drones in the formation completed the calculation of the next path;
[0140](5) Repeat (1-4) until the formation drone arrives at the return position Bq= S.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com