Outer pipeline climbing manipulator device
A technology of manipulators and external pipes, applied in the field of manipulators, to achieve a good gripping effect, convenient gripping and gripping, and a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
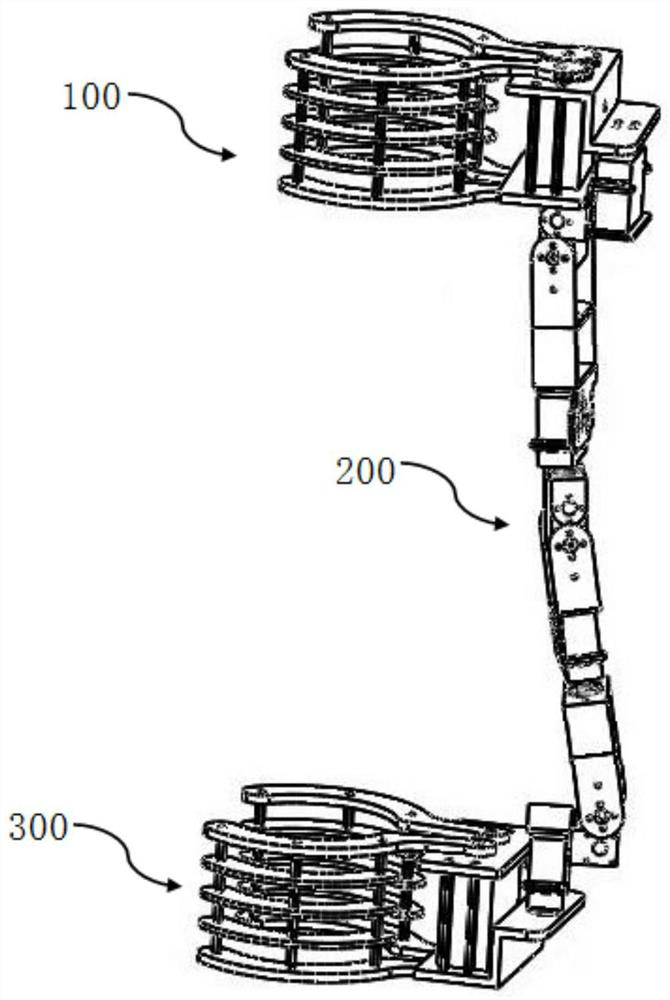
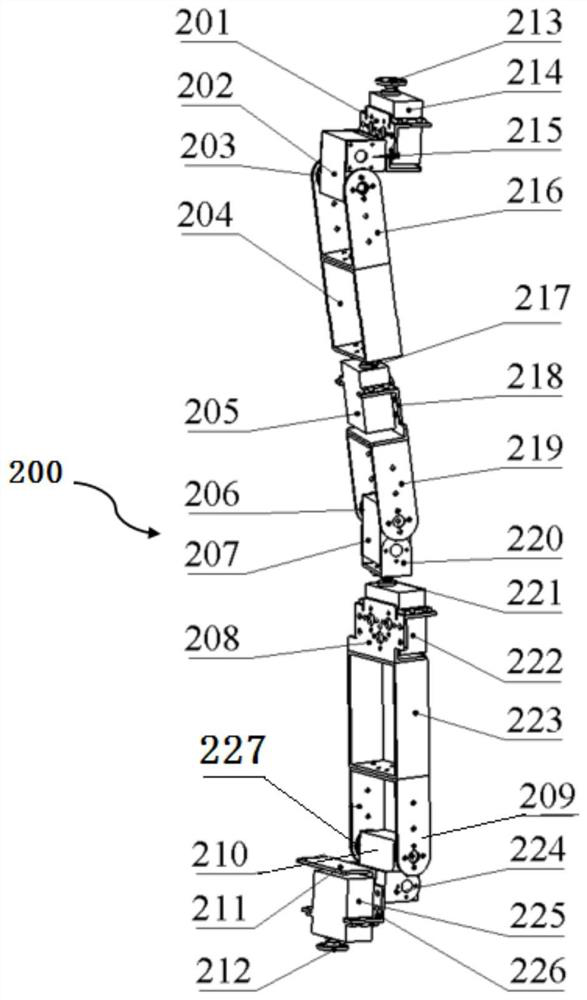
[0039] An outer pipeline climbing manipulator device in this embodiment includes a body unit 200, the upper and lower ends of the body unit 200 are respectively symmetrically provided with an upper gripper 100 and a lower gripper 300, and the upper gripper 100 and the lower gripper 300 The structure is the same, and the upper gripper 100 and the lower gripper 300 are arranged on the same side of the body unit 200, so as to facilitate the upper and lower gripping of the pipe and ensure the strength of holding the pipe. In this embodiment, the upper gripper 100 and the lower gripper 300 are respectively provided with an upper gripper steering gear 107 and a lower gripper steering gear 306, and the upper gripper steering gear 107 and the lower gripper steering gear 306 are respectively used to adjust the upper gripper. The opening and closing angles of the hand 100 and the lower gripper 300 are convenient for gripping pipes with different pipe diameters, ensuring that the upper gr...
Embodiment 2
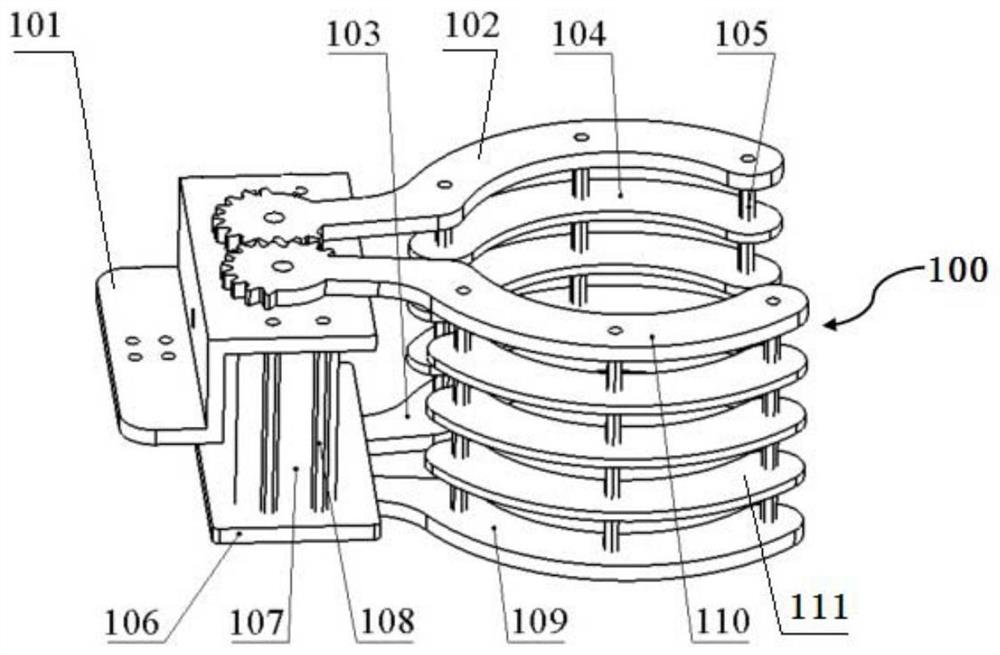
[0045] A kind of outer pipeline climbing manipulator device of this embodiment, the basic structure is the same as embodiment 1, further, as figure 2As shown, in this embodiment, the upper gripper 100 includes an upper gripper steering gear 107, and the top of the upper gripper steering gear 107 is provided with an upper gripper connecting plate 101, and the upper gripper connecting plate 101 is away from one side of the upper gripper steering gear 107. The side is connected with the body unit 200, and the bottom of the upper grip steering gear 107 is installed on the upper steering gear receiving plate 106, and the upper grip connecting plate 101 and the upper steering gear receiving plate 106 are connected through the upper support column 108. Two drive shafts are arranged side by side on the upper gripper steering gear 107, and the two drive shafts pass through the top through hole of the upper gripper connecting plate 101, and the upper gripper front side upper curved arm ...
Embodiment 3
[0049] A kind of outer pipe climbing manipulator device of this embodiment, the basic structure is the same as embodiment 2, further, as Figure 4 As shown, the lower gripper 300 in this embodiment includes a lower gripper steering gear 306, the bottom of the lower gripper steering gear 306 is provided with a lower gripper connecting plate 301, and the lower gripper connecting plate 301 is far away from one side of the lower gripper steering gear 306. The side is connected with the body unit 200, the top of the lower grip steering gear 306 is installed on the lower steering gear receiving plate 302, and the lower grip connecting plate 301 and the lower steering gear receiving plate 302 are connected through the lower support column 307. Two drive shafts are arranged side by side on the lower gripper steering gear 306, and the two drive shafts pass through the bottom through holes of the lower gripper connecting plate 301, and the lower gripper front side lower bent arms 309 are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com