A balance rehabilitation training robot
A technology for rehabilitation training and robotics, which is applied in the direction of adjusting coordination training equipment, cardiovascular system training equipment, gymnastics equipment, etc., and can solve the problems of patients with a sense of balance, inconvenience, and adjusting the height of the armrest of the device, so as to achieve improvement. Practical and functional, improve the effect of rehabilitation training, reduce the effect of labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
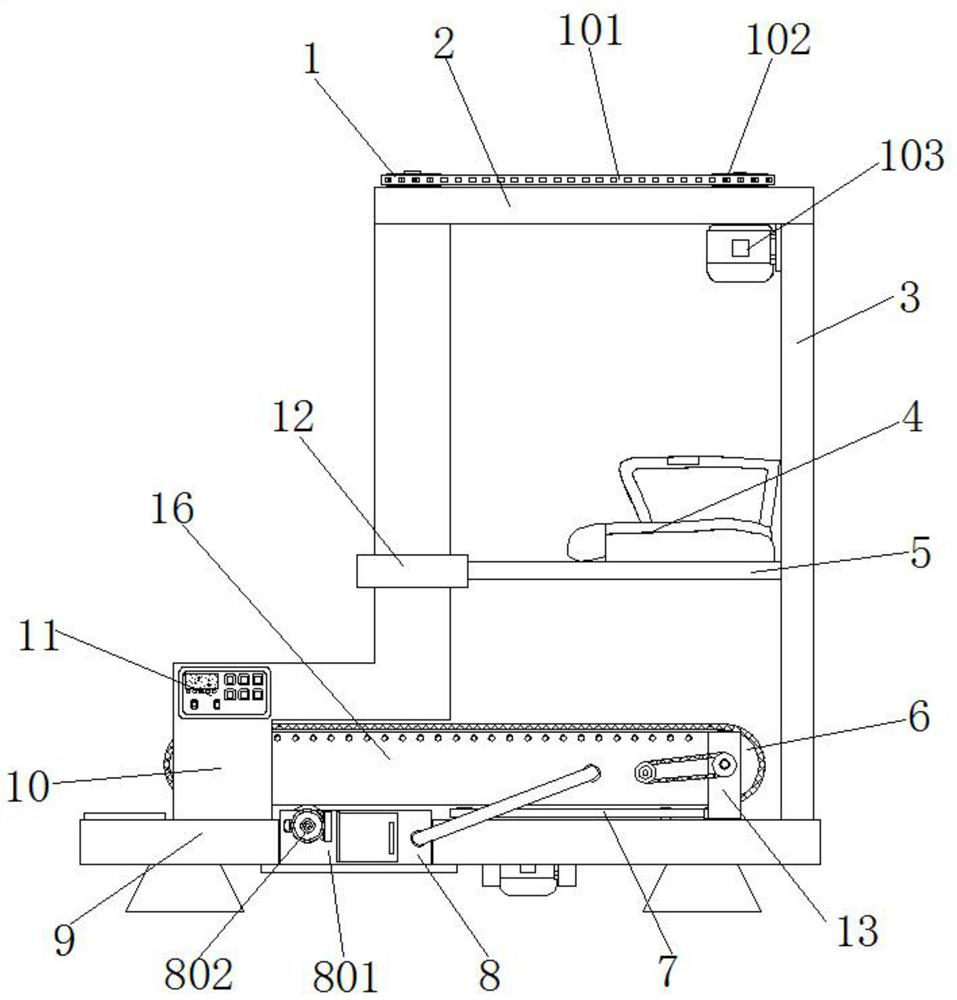
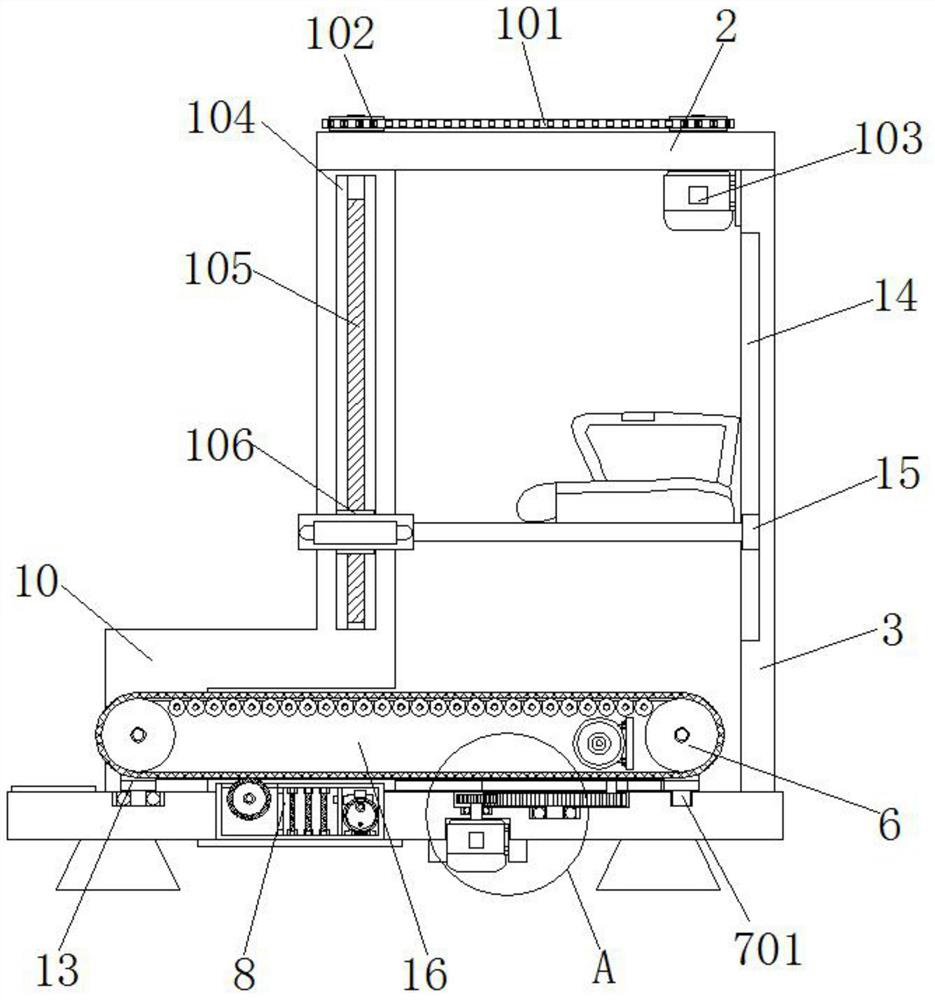
[0036] Example 1, such as Figure 1-5 As shown, according to the actual situation of the patient, if the patient's unbalanced condition is normal, then let the patient stand behind the top of the conveyor belt device 6, and then control the rotation of the first servo motor 103 through the control panel 11 according to the height of the patient. The motor 103 drives two sets of threaded rods 105 to rotate through the cooperation of the chain 101 and the sprocket 102, forcing the lifting slider 106 inside the lifting chute 104 to slide downward gradually until the collar 12 falls to a height suitable for the patient's hand, and then through the control The panel 11 controls the conveyor belt device 6 to start to rotate. The patient walks slowly on the top of the conveyor belt device 6 by holding two groups of auxiliary handles. The height of the collar 12 controls the height of the soft seat board 4, so that the patient can sit on the soft seat board 4 and perform simple walkin...
Embodiment 2
[0037] Example 2, such as Figure 1-7 As shown, when the patient stands on the conveyor belt device 6 for balance rehabilitation training, the second servo motor 708 can be controlled through the control panel 11 to drive the small gear 704 to rotate, and the small gear 704 drives the large gear 706 to rotate according to the patient's rehabilitation situation. The movable column 707 on the bull gear 706 drives the connecting rod 705 continuously with the rotating shaft at the bottom of a group of U-shaped frames 13 as the axis to rotate positively and negatively horizontally through the matching with the limit groove 703. The movement of the patient makes the walking direction of the patient on the conveyor belt device 6 constantly change.
Embodiment 3
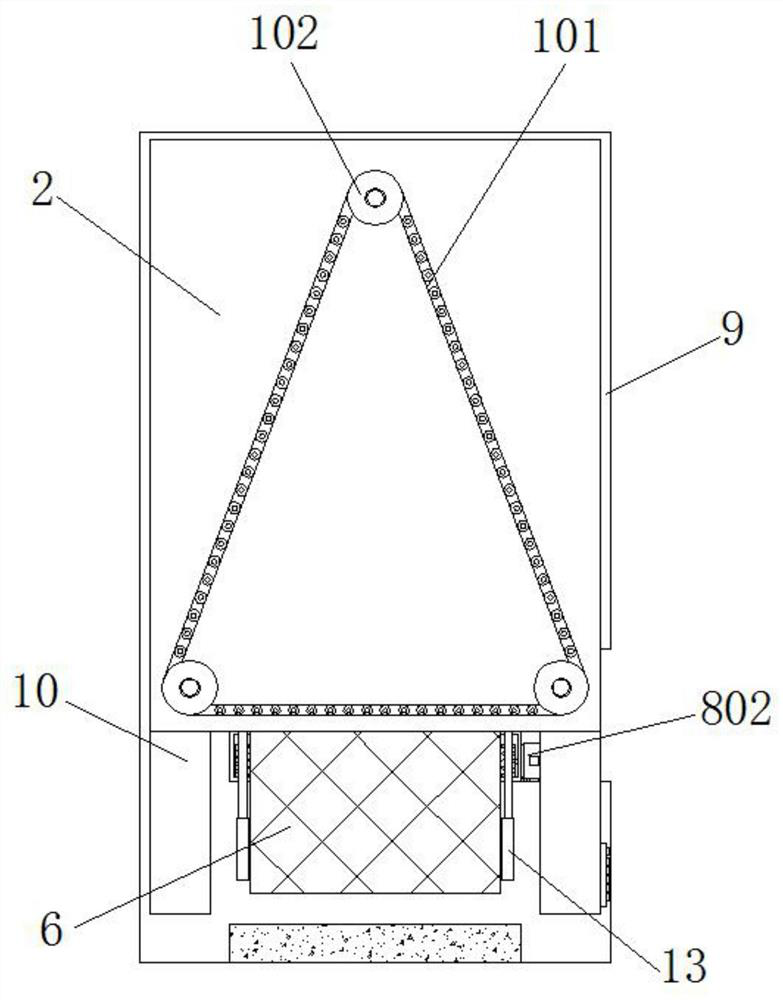
[0038] Example 3, such as figure 1 , 2 As shown in and 6, when the conveyor belt surface of the conveyor belt device 6 needs to be cleaned, the rotating motor 802 is controlled to drive the guide roller 804 to rotate, and the brush 803 on the outside of the guide roller 804 is used to roll and clean the conveyor belt outside of the conveyor belt device 6, and pass The air pump 806 sucks the dust produced by cleaning into the interior of the installation bin 801, and after being filtered by three sets of filter screens 805, the duct at the output end of the air pump 806 is introduced into the interior of the conveyor belt device 6, so that the filtered air is blown to the conveyor belt device 6. The internal motor is used to cool down the motor by wind.
[0039] Working principle: Connect the device to the power supply before use. Firstly, according to the actual situation of the patient, if the patient’s imbalance is normal, let the patient stand behind the top of the conveyo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com