A retinal surgical robot fused with microscope and oct
A technology of surgical robots and microscopes, applied in surgical robots, surgery, surgical navigation systems, etc., can solve the problems of incompatibility between accuracy and real-time performance, poor imaging accuracy and safety of retinal surgery robots, and improve the effect and probability of success , save physical exertion, reduce the effect of surgical risk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
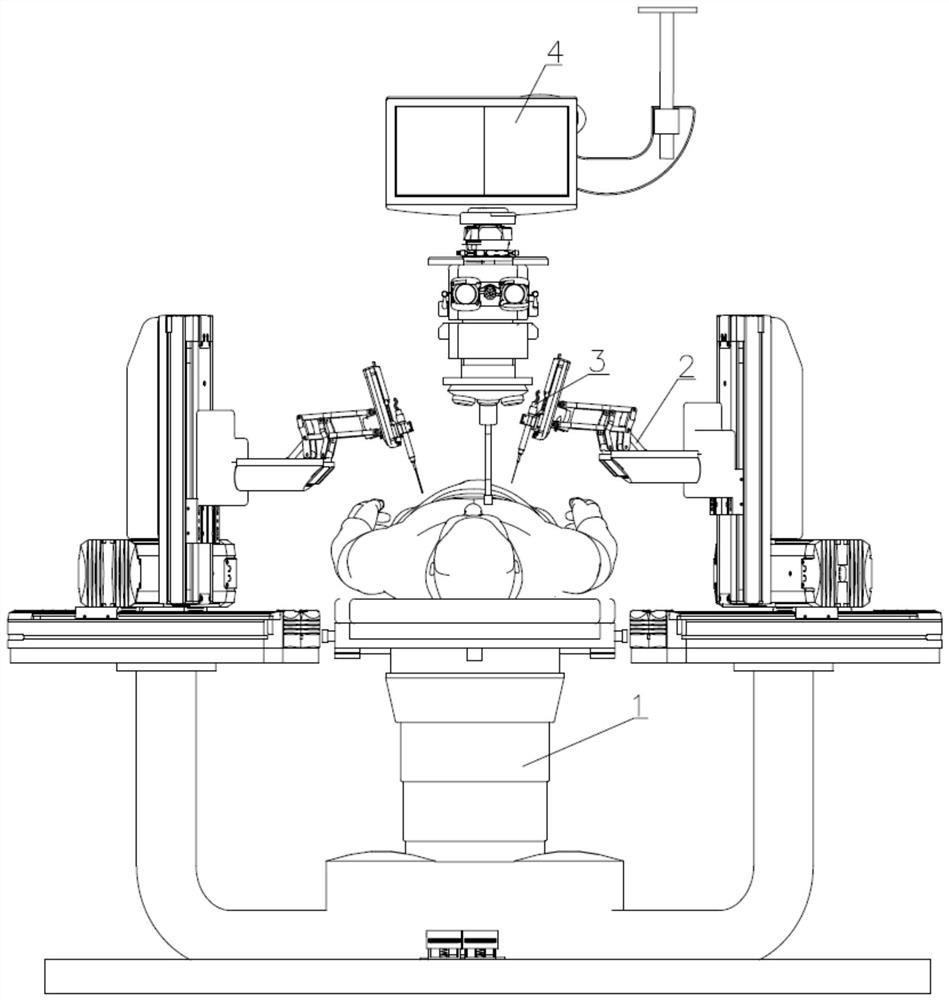
[0029] DETAILED DESCRIPTION One: Combination Figure 1 to 4 Incidentally, a microscope and an OCT fusion retinal surgical robot imaging method, which includes the following steps:
[0030] Step 1: Establish a three-dimensional model;
[0031] The OCT device was used for C scan using an OCT device, and the three-dimensional information results obtained from the C scan were established on the OCT device, and the tissue structure and position information around the injection zone were determined.
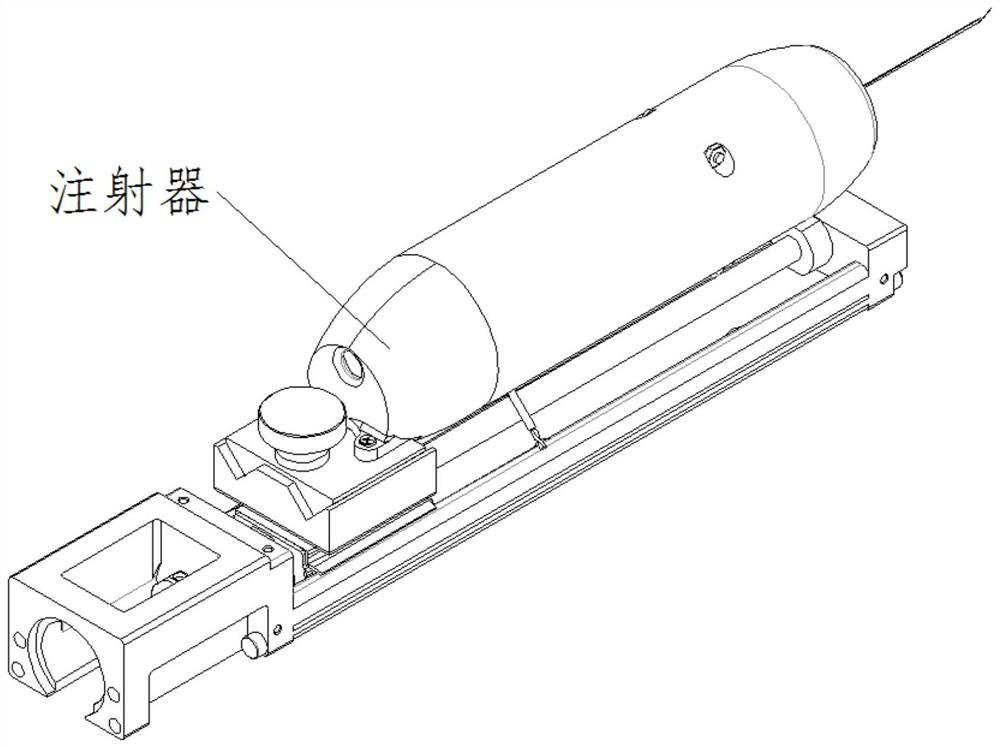
[0032] Step 2: The position of the needle tip 3-1;
[0033] The visual information obtained by the surgical microscope during operation is used, and the real-time depth information of the tip integrated endoscopic OCT fiber probe 3-3 feedback is used to locate and track the tip position;
[0034] Step 3: Regulate the retina three-dimensional model and the intraoperative positioning needle tip position in step one;
[0035] Step 3: Specify the observation coordinate system used in the preope...
specific Embodiment approach 2
[0042] DETAILED DESCRIPTION 2: Combination Figure 1 to 4 When the present embodiment is established in the step one of the steps of the present embodiment, the doctor uses the model to initially diagnose the lesion region, and plan the motion trajectory of the surgical instrument in the eye, establish the puncture position of the injection of the injection of the injection of the injection of the retina . This is set, which is easy to accurately determine the injection position. Other components and connection relationships are identical to those of the specific embodiments.
specific Embodiment approach 3
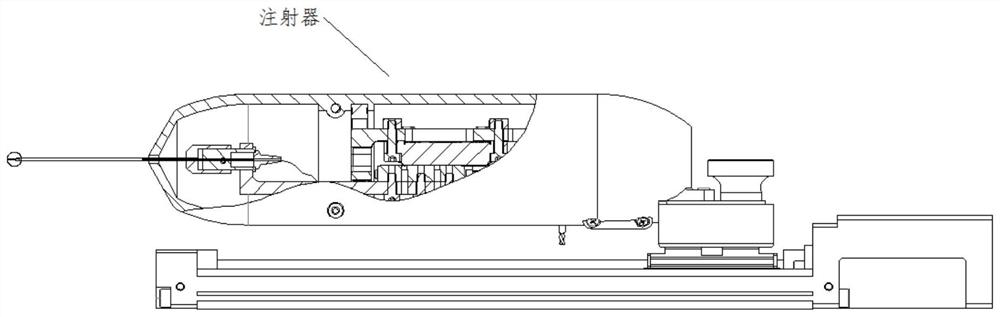
[0043] Specific Embodiment 3: Combination Figure 1 to 4 In the operation of step two of the present embodiment, the doctor observes the horizontal position of the syringe needle tip 3-1 relative target area by microscope, and reaches the piercing point by the mechanical arm master control the needle, and integrates The OCT probe behind the needle tip passes the depth information of the needle tip through the A scan function, providing the exact relative distance between the doctor needle tip and the retina surface. This is set, avoiding the touch of the tip and the fragile tissue in the eye, ensuring the safety of the operation. Other components and connection relationships are the same as those of the specific embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com