Swarm robot multi-target searching method in unknown environment
A swarm robot and unknown environment technology, applied in the field of robot target search, can solve the problems of not being able to know the global map and not being able to obtain environmental information in advance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
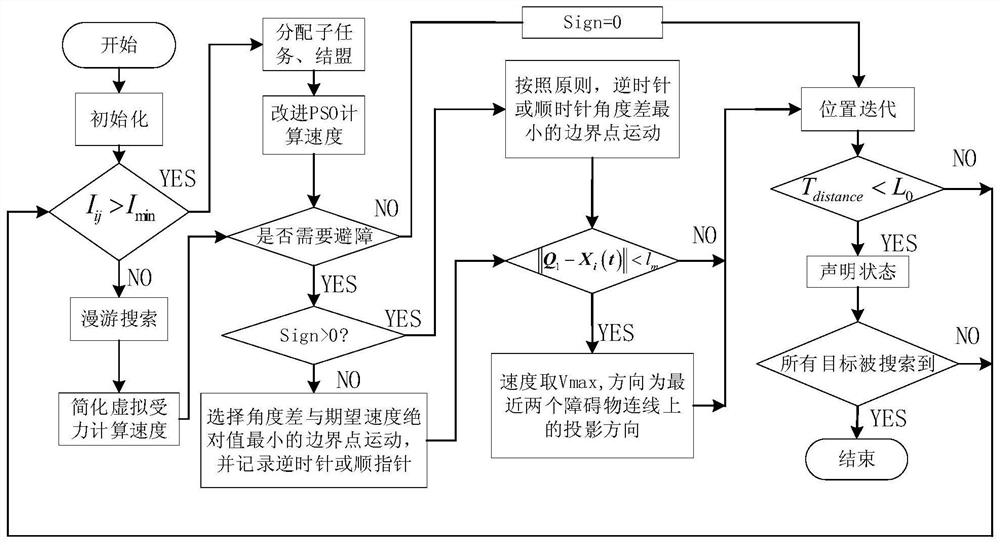
[0095] like figure 1 As shown, a multi-target search method for swarm robots in an unknown environment includes the following steps:
[0096] Step 1: Construct unknown environment model and target response function.
[0097] The process of building an unknown environment model is:
[0098] Finite two-dimensional space R 2 Inside, there exists a universal set U={R∪T∪B}, where group robots R={R i |i=1,2,...,i max ,i max ≥10}, R i is the i-th robot, i max is the total number of robots; target T={T j |j=1,2,...,j max ,j max >1},T j is the jth target, j max is the total number of targets; obstacle B={B s |s=1,2,...,s max ,s max ≥1}, B s is the sth obstacle, s max is the total number of obstacles; R i , T j , B s The positions are denoted as X i (t), T(x j ,y j ), B(x s ,y s ); in this environment, the group robot R acts as the search...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com