A temperature-first grasping method for dense objects with robotic arms based on deep reinforcement learning
A technology of intensive learning and dense objects, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficulty, general grasping effect of densely stacked objects, difficulty in applying unstructured scenes, etc., and achieve the goal of improving grasping performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
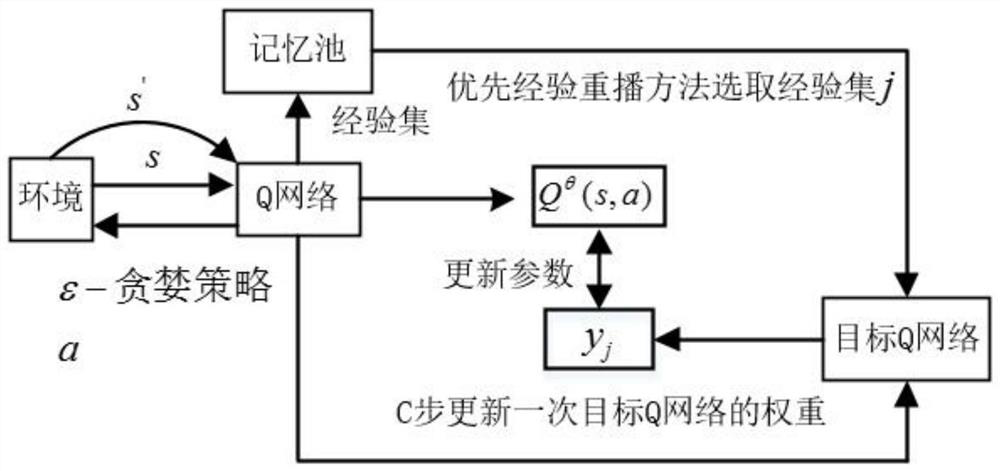
[0141] The present invention uses a deep reinforcement learning algorithm to enable the robotic arm to learn the optimal grasping strategy faster under training, and has the ability to preferentially grasp objects with higher temperature; the present invention uses the UR5 robotic arm and the RG2 robotic arm as examples. In detail, the RG2 manipulator is the end effector of the manipulator, which moves in the horizontal and vertical directions; the image information is captured by the RGB-D camera and the infrared thermal imager, and the image is rendered by OpenGl;
[0142] The task scenario designed in this embodiment is to use the robotic arm to grab 10 objects of random temperature, color, and shape. These objects are stacked irregularly and densely until the robotic arm grabs all the objects.
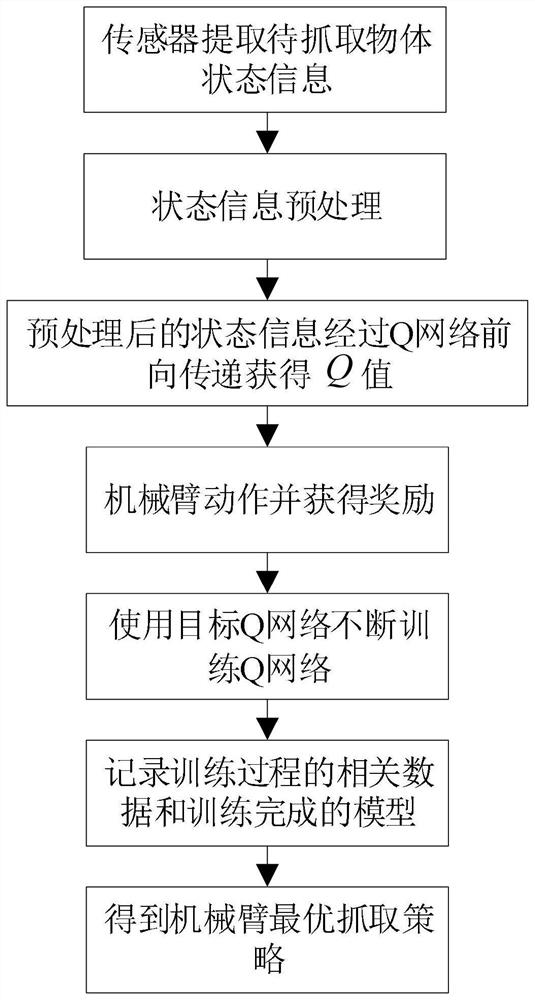
[0143] Such as figure 2 As shown, the temperature-first grasping method for dense objects with a robotic arm based on deep reinforcement learning described in this embodiment incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com