Programmable robot system and control method
A robot system and robot technology, applied in the field of robots, can solve the problems of no learning and editable ability, rigid and inflexible functions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 2 example
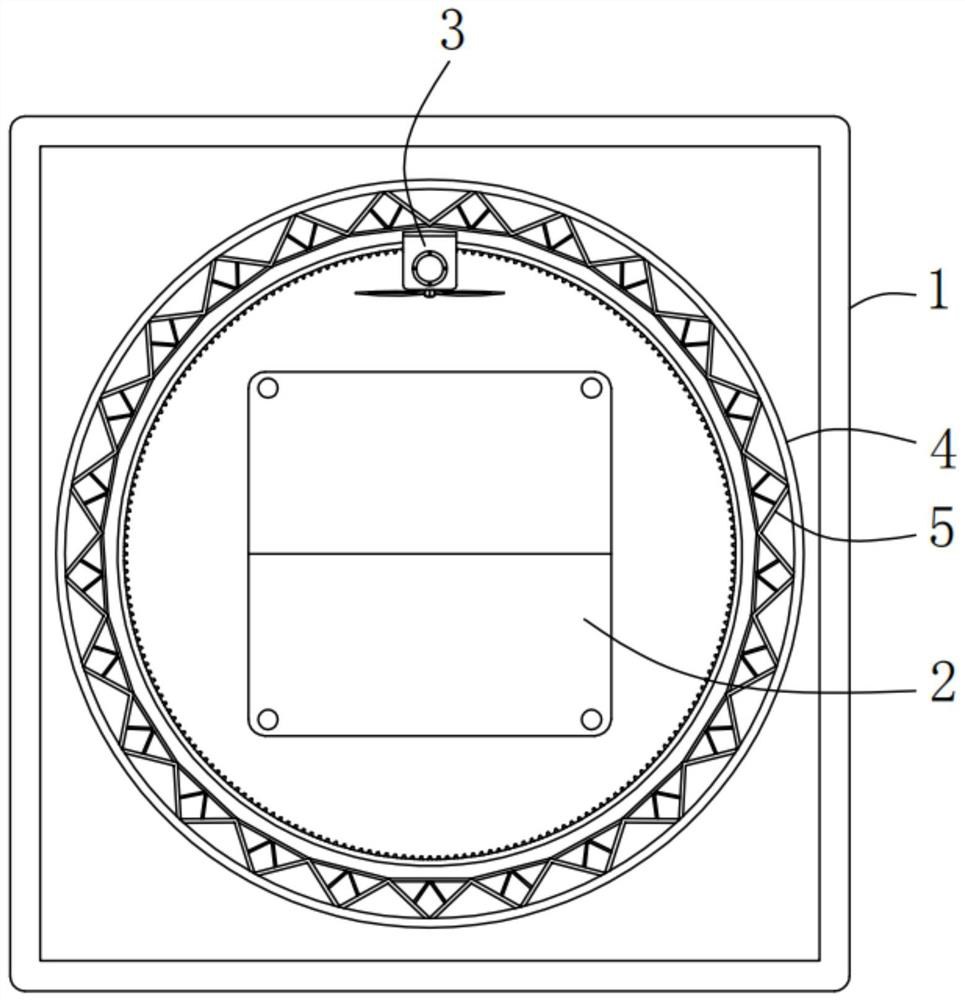
[0059] Please refer to image 3 , Figure 4 and Figure 5 , based on the programmable robot system provided in the first embodiment of the present application, the second embodiment of the present application proposes another programmable robot system. The second embodiment is only a preferred mode of the first embodiment, and the implementation of the second embodiment will not affect the independent implementation of the first embodiment.
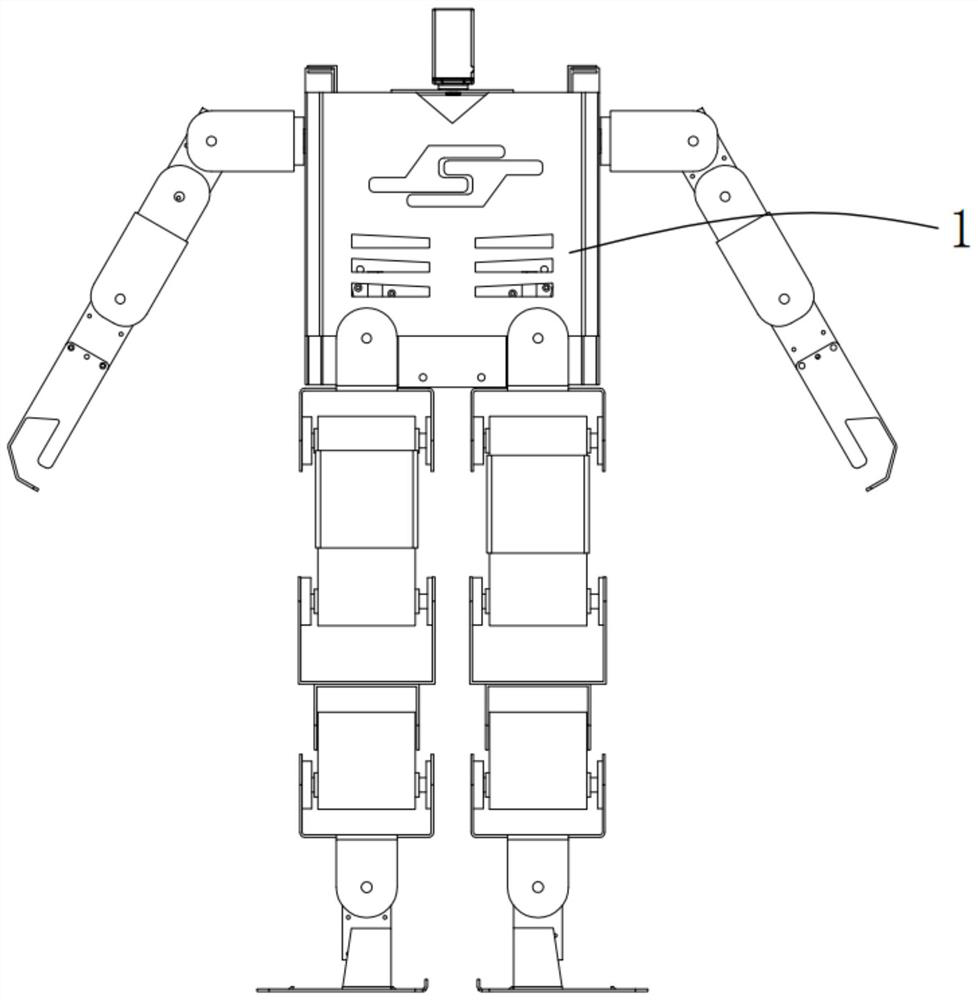
[0060] Specifically, the difference between the programmable robot system provided by the second embodiment of the present application is that the programmable robot system further includes a robot body 1, and a part of the inner wall of the robot body 1 The side is fixedly installed with a circuit board 2, and one side of the inner wall of the robot body 1 is fixedly installed with a rotating air cooling device 3 on the outside of the circuit board 2, and one side of the inner wall of the robot body 1 is located at the side of the rota...
no. 3 example
[0070] Please refer to Figure 6 , Figure 7 , Figure 8 and Figure 9 , based on the programmable robot system provided in the first embodiment of the present application, the second embodiment of the present application proposes another programmable robot system. The second embodiment is only a preferred mode of the first embodiment, and the implementation of the second embodiment will not affect the independent implementation of the first embodiment.
[0071] Specifically, the difference between the programmable robot system provided by the second embodiment of the present application is that, in the programmable robot system, one side of the inner wall of the robot body 1 is located on the upper side of the circuit board 2 A heat dissipation box 7 is fixedly installed, and a fan 8 is fixedly installed on the top of the heat dissipation box 7. The output end of the fan 8 is fixedly connected with an air delivery pipe 9, and one end of the air delivery pipe 9 is connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com