Control method of cleaning robot system
A cleaning robot and control method technology, applied in the field of intelligent cleaning robots, can solve the problems of high cost, serious dust, high maintenance cost of base stations, etc., and achieve the effects of low maintenance cost, convenient use, and easy dumping and disposal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
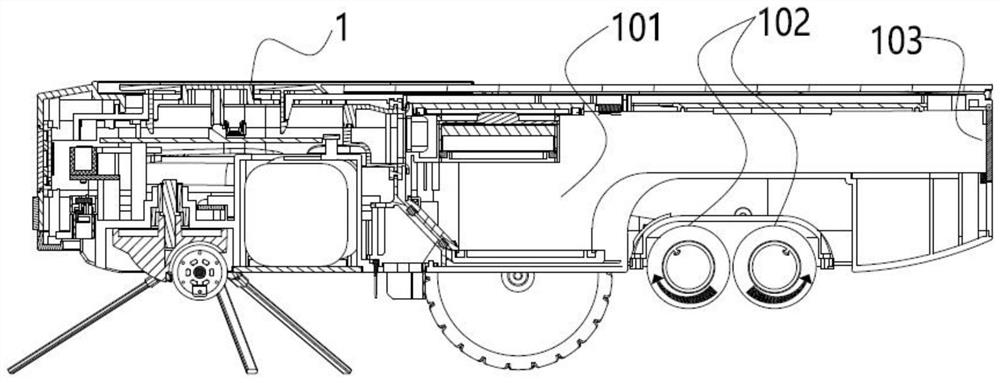
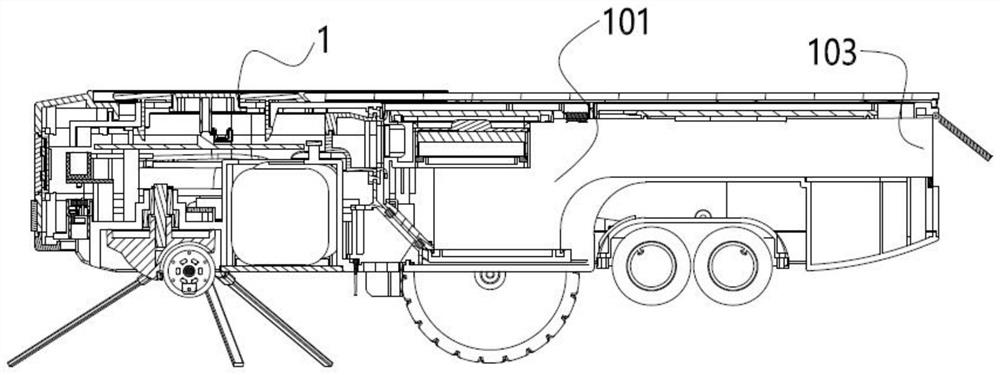
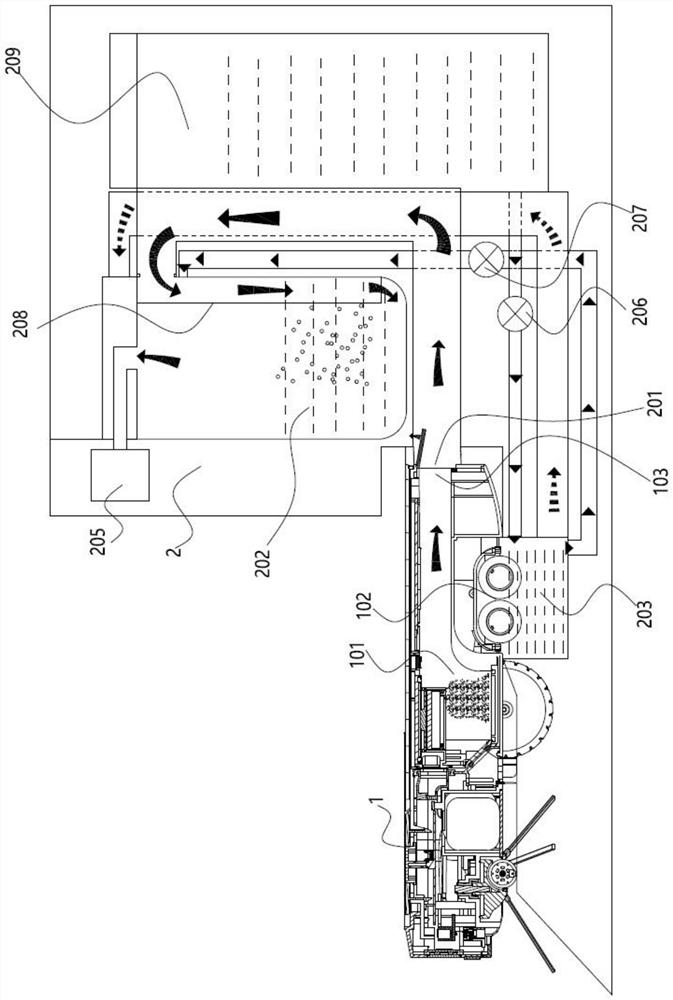
[0038] Embodiment: a control method of a cleaning robot system of the present invention, such as Figure 1 to Figure 4 As shown in the composition, it includes: a cleaning robot 1, an integration station 2, and the integration station 2 is set as an independent part relative to the cleaning robot 1; There are cleaning parts 102 to mop and clean the ground; the cleaning robot 1 is provided with driving wheels for walking, and the cleaning robot 1 is provided with a garbage chamber 101, and the garbage chamber 101 communicates with the suction port at the bottom of the cleaning robot 1 to collect and suck the garbage on the ground To collect in the garbage cavity 101, a fan is mainly installed on one side of the garbage cavity 101, and the fan generates suction to realize the absorption of ground garbage. This belongs to the prior art and will not be described in detail.
[0039] For the cleaning part 102 of the cleaning robot 1, a motor is installed in the cleaning robot 1, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com