Semantic SLAM method based on GMS feature matching in dynamic scene
A feature matching and dynamic scene technology, applied in image data processing, instrumentation, computing, etc., can solve the problems of low detection accuracy and robustness of SLAM methods, and achieve the effect of improving accuracy and robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
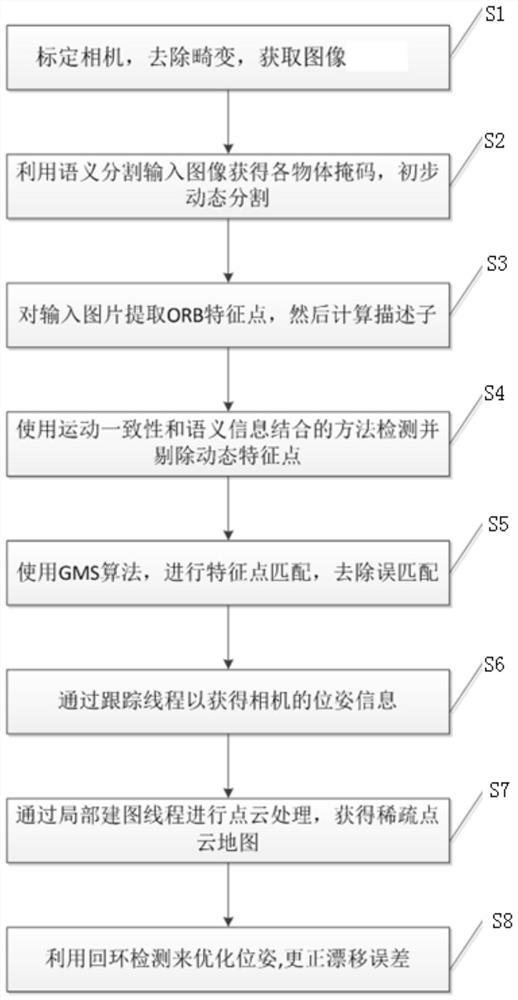
[0062] Such as figure 1 Shown is an embodiment of a semantic SLAM method based on GMS feature matching under a dynamic scene, including the following steps:
[0063] Step 1: Calibrate the camera to remove image distortion; acquire and input the environment image; calibrate the camera to remove image distortion. The specific steps are:
[0064] S1.1: First obtain the internal parameters of the camera, where the internal parameters include f x ,f y ,c x ,c y , normalize the three-dimensional coordinates (X, Y, Z) to homogeneous coordinates (x, y);
[0065] S1.2: Remove the influence of distortion on the image, where [k 1 ,k 2 ,k 3 ,p 1 ,p 2 ] is the distortion coefficient of the lens, r is the distance from the point to the origin of the coordinate system:
[0066]
[0067] S1.3: Transfer the coordinates in the camera coordinate system to the pixel coordinate system:
[0068]
[0069] Step 2: Segment the input image through the semantic segmentation network, obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com