Quad-rotor unmanned aerial vehicle reinforcement learning nonlinear attitude control method
A four-rotor UAV, reinforcement learning technology, applied in attitude control, non-electric variable control, vehicle position/route/altitude control, etc., can solve the problem of insufficient generalization ability of the controller
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0084] The technical scheme adopted by the present invention is: establish a kind of quadrotor unmanned aerial vehicle dynamics model including the unmodeled part of the system, and design the corresponding reinforcement learning nonlinear attitude controller, including the following steps:
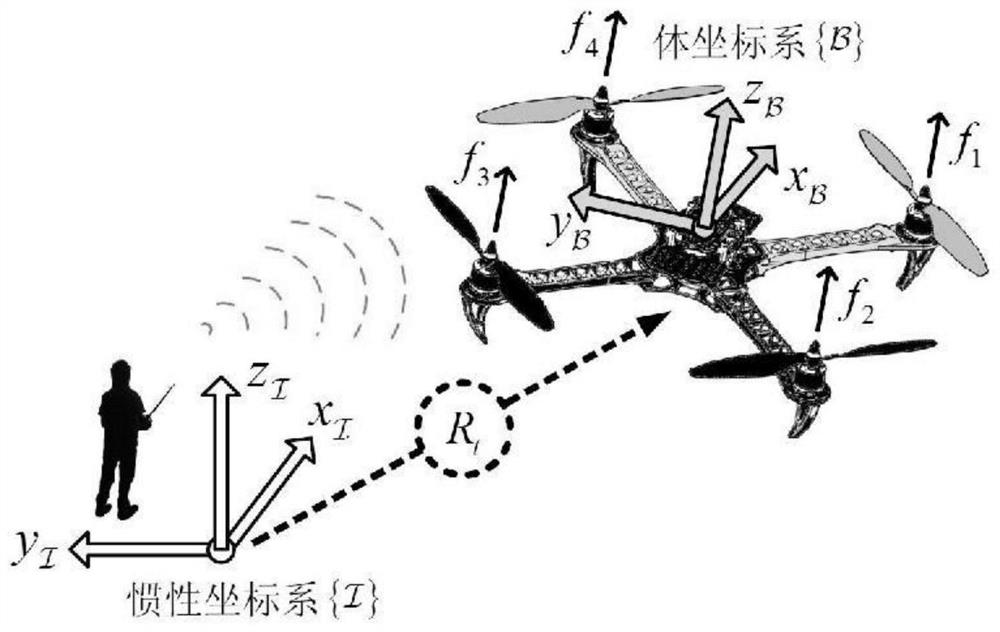
[0085] First, a dynamic model of the quadrotor UAV needs to be established. figure 1 It is a schematic diagram of the quadrotor UAV system used in this paper. In the present invention, the unmanned aerial vehicle is an X-shaped four-rotor unmanned aerial vehicle, and adopts the Newton-Euler method to establish the dynamic model of the four-rotor unmanned aerial vehicle, and the expression is as follows:
[0086]
[0087] The variables in formula (1) are defined as follows: M(η) represents the inertia matrix, represents the Coriolis and centrifugal force matrices, Represents the rotational damping coefficient matrix, where K 1 、K 2 and K 3 are all unknown constants. Δ(η) repre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com