Multi-rod quadruped robot
A quadruped robot and mechanical leg technology, applied in the field of robotics, can solve problems such as buffering, potential safety hazards, and short service life of bionic robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
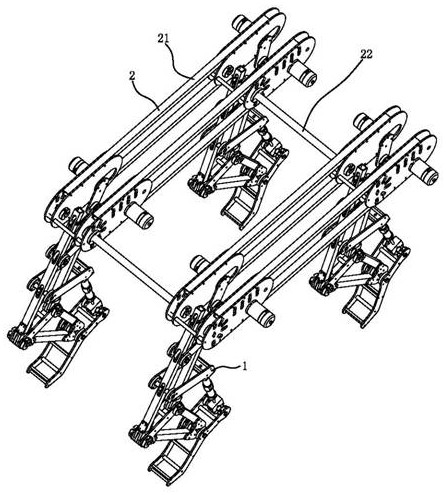
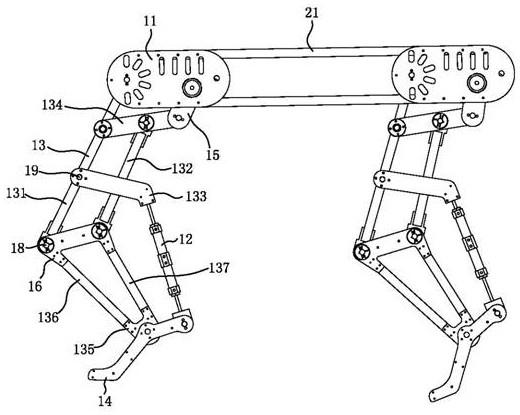
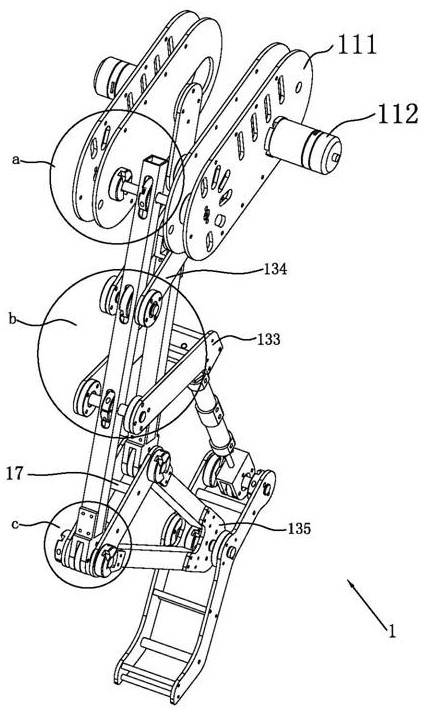
[0047] Such as Figure 1-15 Shown; A kind of multi-rod quadruped robot, comprises fuselage support 2 and mechanical leg group; Mechanical leg group comprises more than one mechanical leg; In the present embodiment; Mechanical leg group is provided with two groups; One group of mechanical leg group There are two mechanical legs; there are four mechanical legs 1 in total. The fuselage support 2 includes a transverse support 22 and a longitudinal support 21 . Adjacent mechanical legs 1 are connected by longitudinal brackets 21 ; adjacent mechanical leg groups are connected by transverse brackets 22 . The support strength and stability of the mobile device are improved by setting the transverse support 22 and the longitudinal support 21 . The transverse support 22 is provided with an ultrasonic obstacle avoidance module (not shown in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com