Acceleration adjustment device and acceleration adjustment program
A technology for adjusting the device and acceleration, applied in the direction of program control, program control manipulator, control/regulation system, etc., can solve the problems of burden, large users, shortened takt time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
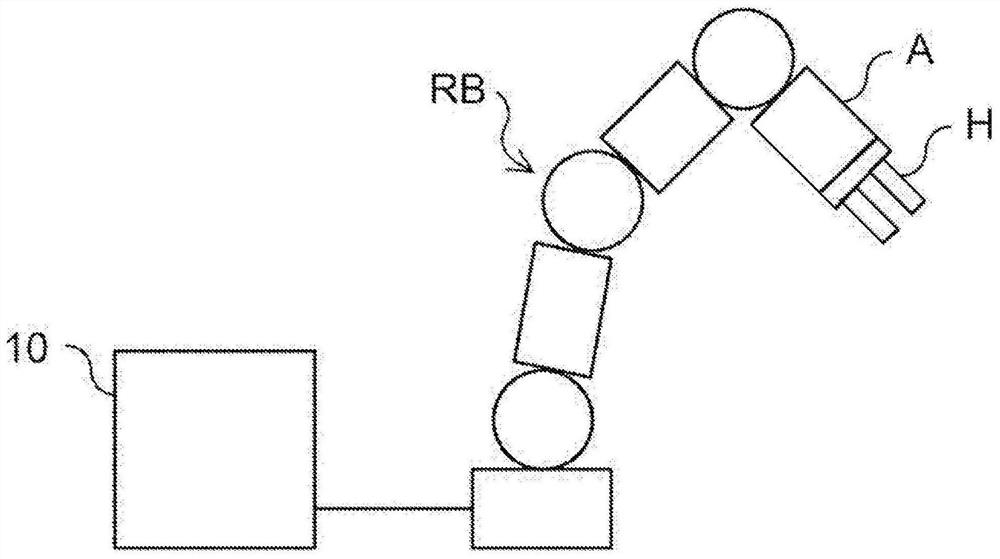
[0039] figure 1 It is a diagram showing a schematic configuration of a robot and an acceleration adjustment device.
[0040] Such as figure 1 As shown, the acceleration adjustment device 10 is connected to the robot RB, and adjusts parameters (operation command values) when the robot RB operates. The acceleration adjustment device 10 may be incorporated in the control device as one function of the control device for controlling the robot RB. The detailed configuration of the acceleration adjustment device 10 will be described later.
[0041] The robot RB moves along a plurality of teaching points taught by a user or a plurality of passing points generated from a path plan. During the movement, the robot RB follows various motion command values. Various motion command values include, for example, maximum speed, acceleration, and the like. The robot RB moves according to the acceleration adjusted by the acceleration adjustment device 10 .
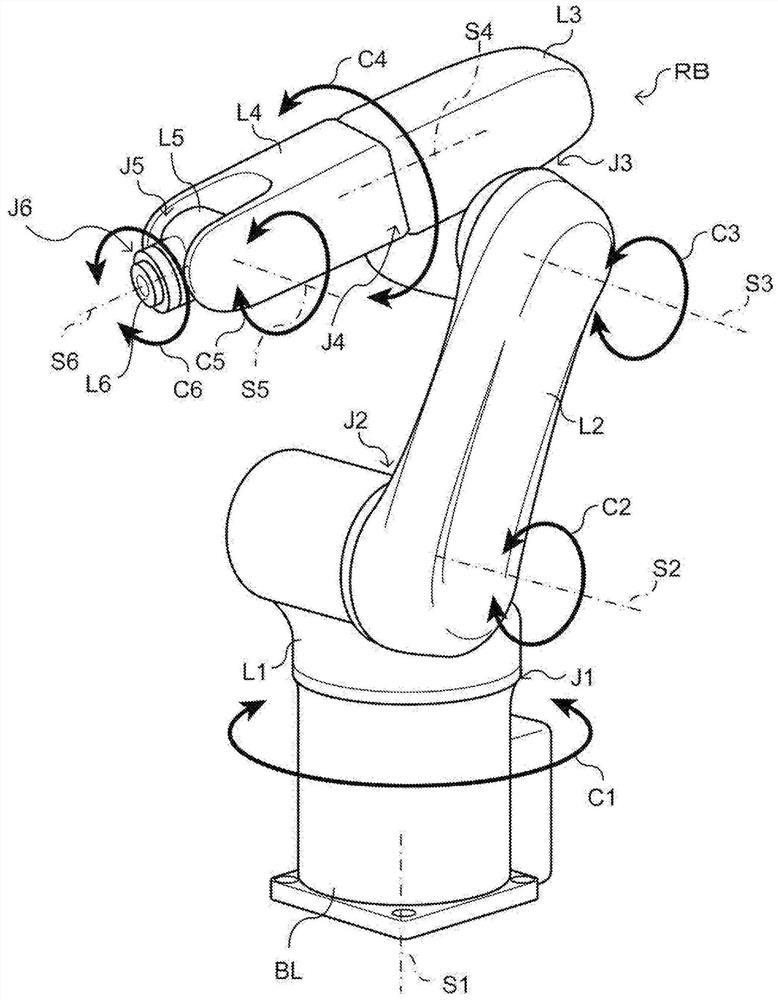
[0042] As an example, the robo...
no. 2 approach
[0098] In the first embodiment, the acceleration is adjusted in conjunction with the load target value throughout the path of the robot RB. In the second embodiment, the path of the robot RB is divided into a plurality of sections, and the acceleration is adjusted for each section.
[0099] Next, the acceleration adjustment device 10 of the second embodiment will be described.
[0100] Figure 10 It is a flowchart showing the flow of acceleration adjustment processing performed by the acceleration adjustment device of the second embodiment. The CPU 11 reads the acceleration adjustment program from the ROM 12 or the memory 14 , expands and executes it in the RAM 13 , thereby performing acceleration adjustment processing. Also, yes Figure 10 The processing steps shown are with Figure 5 The same steps in the acceleration adjustment process of the first embodiment shown are assigned the same step numbers, and detailed descriptions thereof are omitted.
[0101] CPU11 substit...
no. 3 approach
[0119] In the first embodiment and the second embodiment, the case of teaching the route of the robot RB has been described. In the third embodiment, the acceleration adjustment device 10 itself generates the path of the robot RB.
[0120] Figure 17 It is a block diagram showing the functional configuration of the acceleration adjustment device of the third embodiment.
[0121] In the acceleration adjustment device 10 of the third embodiment, in Figure 4 In addition to the functional configuration of the acceleration adjustment device 10 of the first embodiment shown, a path generation unit 201 is further included. The route generation unit 201 is realized by the CPU 11 reading the acceleration adjustment program stored in the ROM 12 or the memory 14 , expanding and executing the program in the RAM 13 .
[0122] The path generation unit 201 acquires initial posture data and final target posture data of the robot RB. For example, six-dimensional vectors having rotation an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com