ACO-based ROS robot global path optimization method
A path optimization and robot technology, applied in the direction of instruments, two-dimensional position/course control, vehicle position/route/height control, etc., to avoid blindness in optimization, improve convergence speed and optimization effect, and reduce space complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
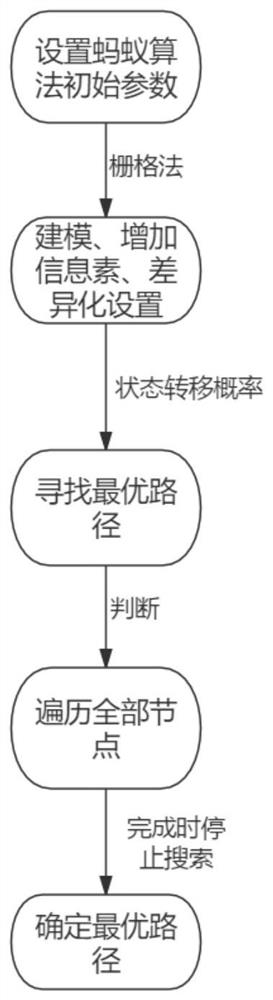
[0055] refer to Figure 1 to Figure 6 , for the first embodiment of the present invention, a kind of ROS robot global path optimization method based on ACO (ant colonyoptimization, ACO ant algorithm) is provided, comprising:
[0056] S1: Set the initial parameters of the ant colony algorithm. It should be noted that the initial parameters include:
[0057] The total number of ants M, the information heuristic coefficient α, the expected heuristic coefficient β, the pheromone volatilization coefficient ρ, the adjustment coefficient δ and other parameters, the maximum number of iterations N max .
[0058] S2: Use the grid strategy to model the environmental map, select the preferred area according to the starting point and the target point to increase the initial value of the pheromone, and combine the sum of the distance and the distance ratio between the node and the starting point and the target point to differentially increase the pheromone Quantity settings. refer to ...
Embodiment 2
[0091] refer to Figure 7 ~ Figure 18 , is the second embodiment of the present invention, and this embodiment is different from the first embodiment in that it provides a verification of an ACO-based ROS robot global path optimization method, including:
[0092] In order to better verify the real technical effect of the present invention, the present embodiment chooses to compare the real-time measurement and comparison of the mobile robot with the traditional ant colony algorithm and the present invention, and compares the test results by means of scientific demonstration to verify the advantages of the present invention. authenticity.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com