A Causal Analysis Method for Underwater Vehicle Steerability
An underwater vehicle, causal analysis technology, applied in instrumentation, geometric CAD, design optimization/simulation, etc., to achieve the effect of input simplification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
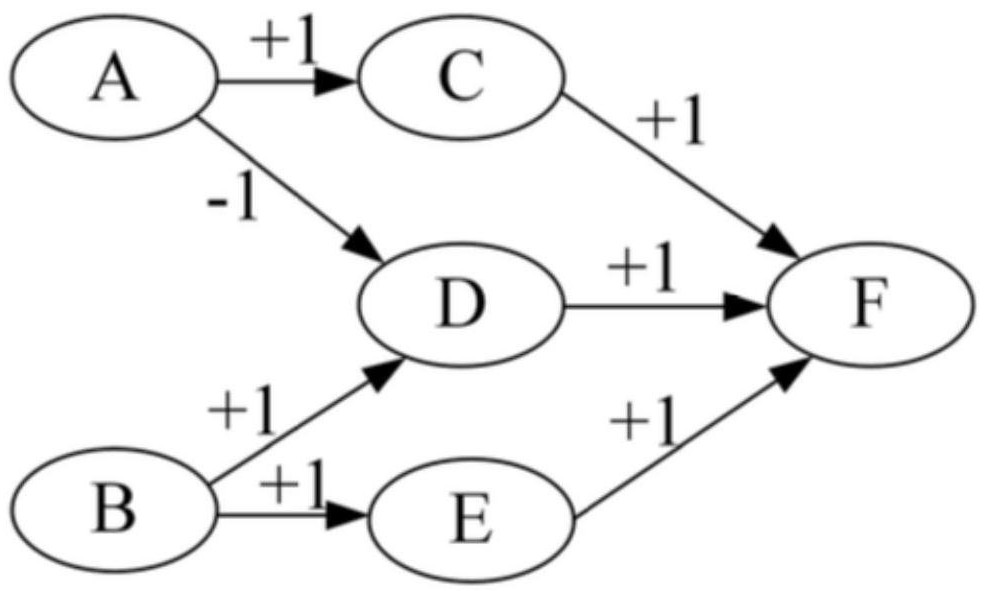
[0064] A causal analysis method for the handling stability of underwater vehicles proposed by the present invention, the schematic diagram of the causal diagram is as follows figure 1 shown. For example, a "+1" arrow from A to C means that A increases when C increases; multiplying a "+1" arrow from A to C, and a "+1" arrow from C to F, the result of the multiplication operation is "+1 "This means that F is monotonically increasing with respect to A; at the same time figure 1 Among them, A affects F through C or D, and the two have opposite effects, so A can be considered as a contradictory variable.
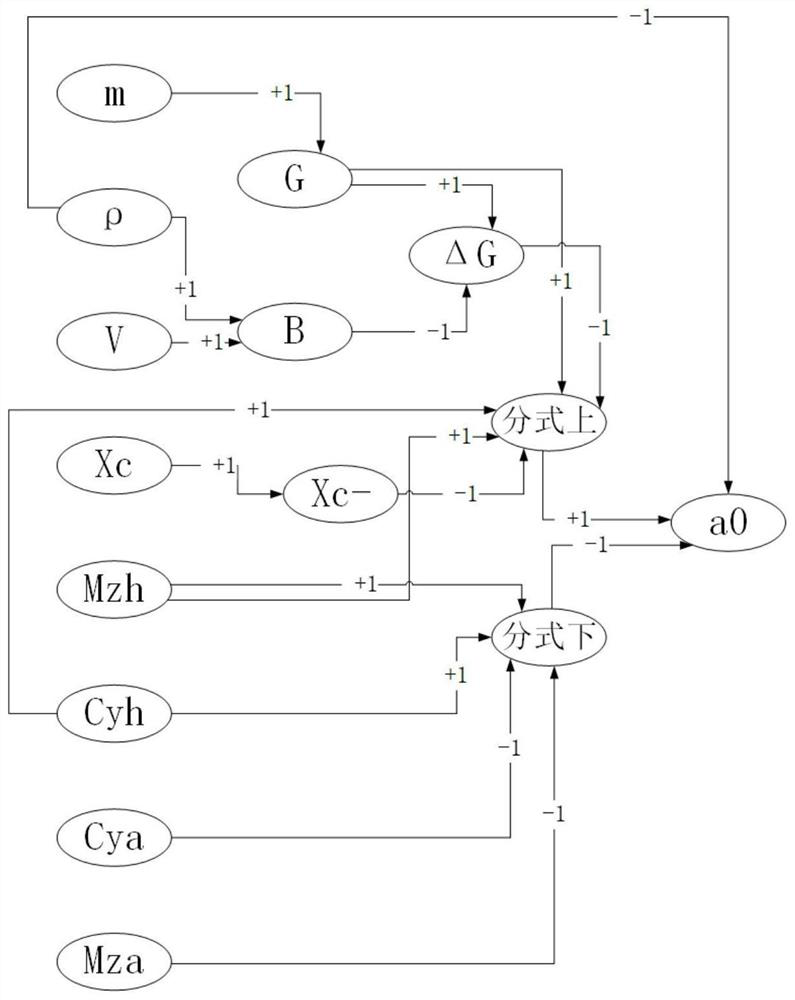
[0065] Combined with the analysis example of the angle of attack balance of the maneuverability of the underwater vehicle and the accompanying drawings, it will be further explained.
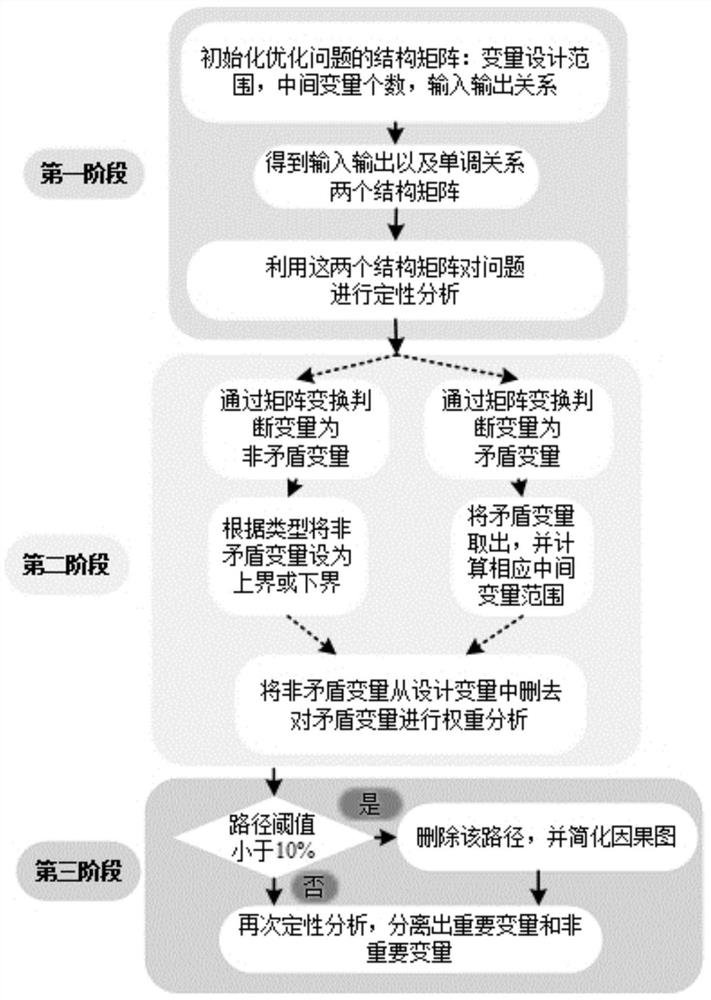
[0066] The main analysis process is as figure 2 ,include:
[0067] 1. Determine the basic form of the structure matrix of the underwater vehicle's stability balance angle of attack
[0068] C...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com