A UAV swarm cooperative task planning method for air maneuvering operations
A mission planning and unmanned aerial vehicle technology, which is applied in non-electric variable control, position/direction control, instruments, etc., can solve problems such as unsatisfactory optimization results, poor solution space search ability, and long time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
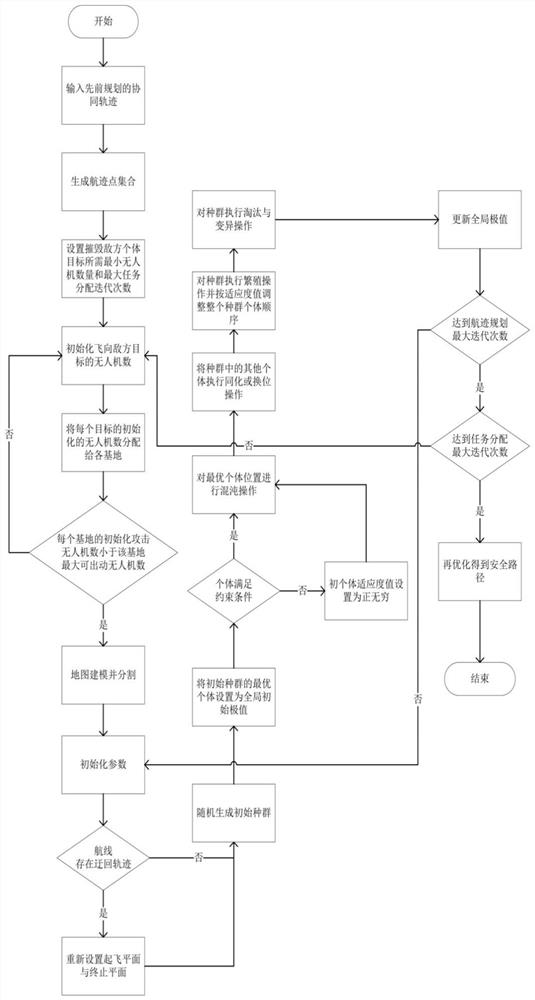
[0073] The present embodiment discloses a method for planning a coordinated task for a swarm of unmanned aerial vehicles oriented to maneuvering in the air, and the specific implementation steps are as follows:
[0074] Step 1. Establishment of the mathematical model of UAV cooperative mission planning.
[0075] The mathematical model of UAV cooperative mission planning established according to the maximum range and distance constraints of each UAV, the maximum turning angle, the maximum climb and dive angle, the minimum and maximum flight altitude, the minimum safety distance between the UAVs and the purpose of mission planning is as follows: (29)-(35):
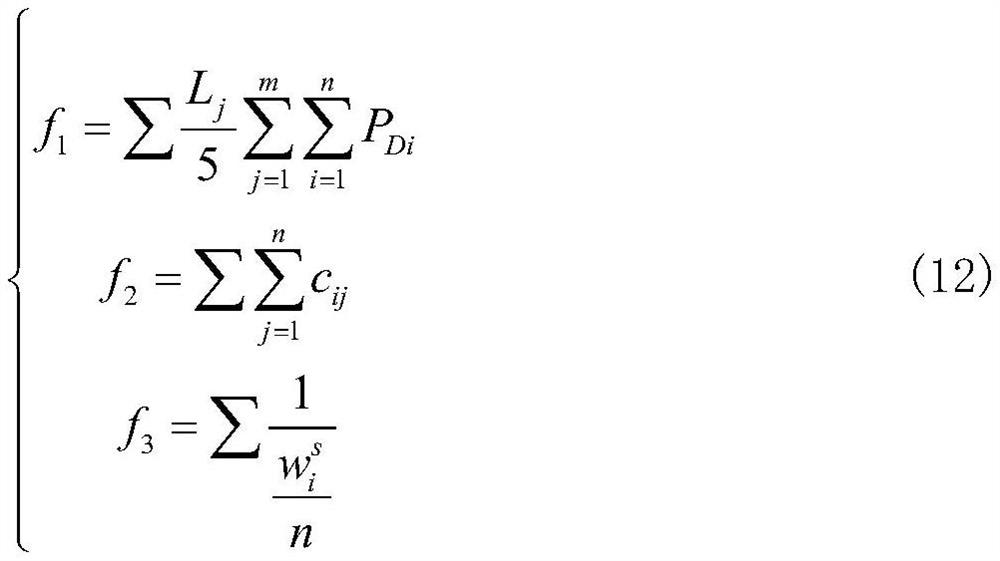
[0076] The objective function of UAV cooperative mission planning:
[0077] min(f 1 ,f 2 ,f 3 ) (29)
[0078]
[0079] UAV maximum turning angle constraints:
[0080]
[0081] UAV maximum climb and dive angle constraints:
[0082]
[0083] UAV minimum / maximum flight altitude constraints:
[0084]
[0085]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com