A dynamic motion generation and control method for a biped robot
A biped robot and dynamic motion technology, applied in the field of humanoid robots, can solve problems such as complicated calculations, achieve the effects of reducing energy consumption, improving stability, and increasing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It is to be understood that the specific embodiments described herein are intended to illustrate the invention and are not intended to limit the invention.
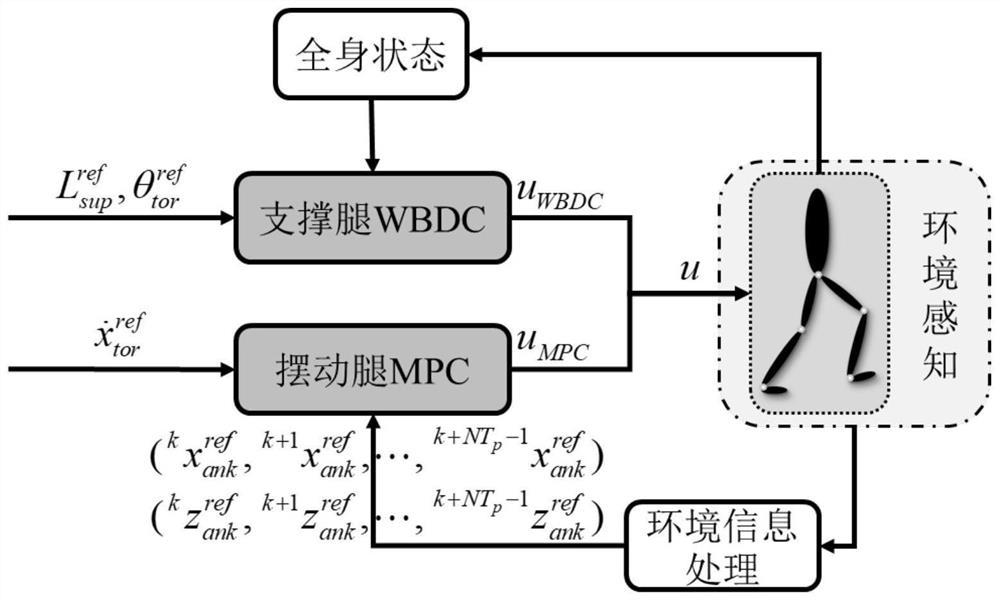
[0066] like figure 1 , A dynamic motion generation and control method of a bipple robot, in a single foot support period, by establishing a systematic dynamics feedback linearization control (WBDC), the length of the support leg, and the attitude of the upper body pitch Dynamic motion characteristics of robots. Since the length of the support leg is fixed, the physical properties of the entire robot are close to the inverted pendulum model.
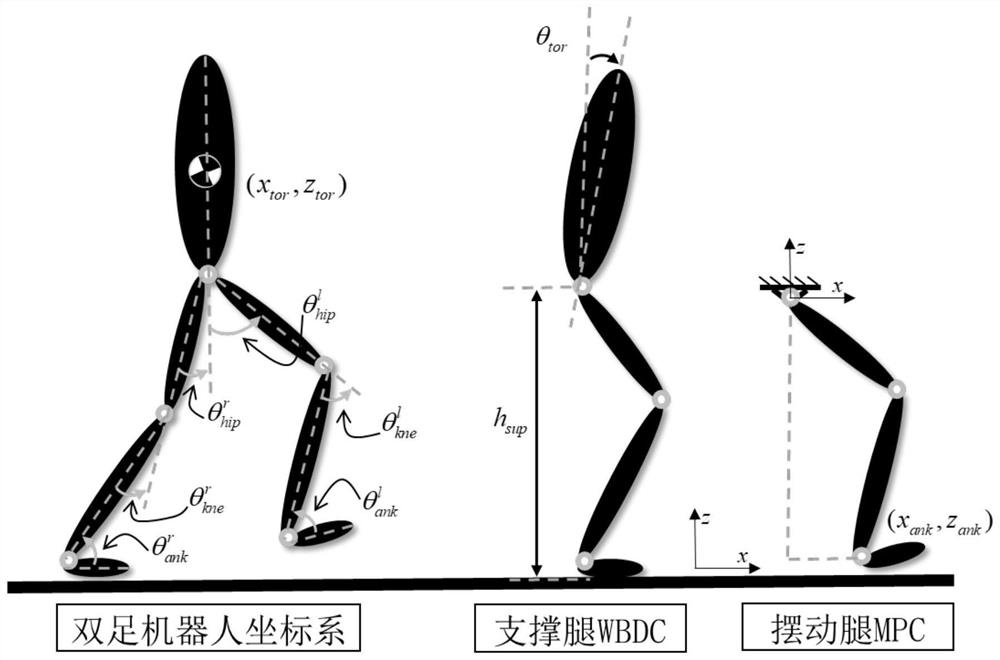
[0067] The method for establishing a systematic dynamics is: Taking the plane 7 link double-foot robot model as an example, the model includes 1 upper body drive, 2 th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com