


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot control method and device, electronic equipment and storage medium
A control method and robot technology, applied in the field of human-computer interaction, can solve problems such as difficulty in communication, lack of intelligent interaction in human-computer interaction, lack of user emotional communication, etc., and achieve the effect of improving user experience and intelligent interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
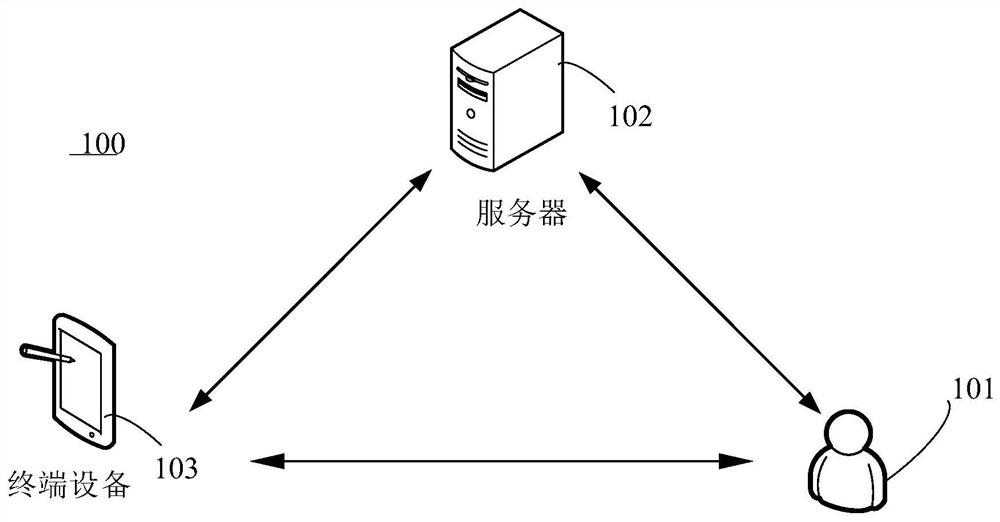
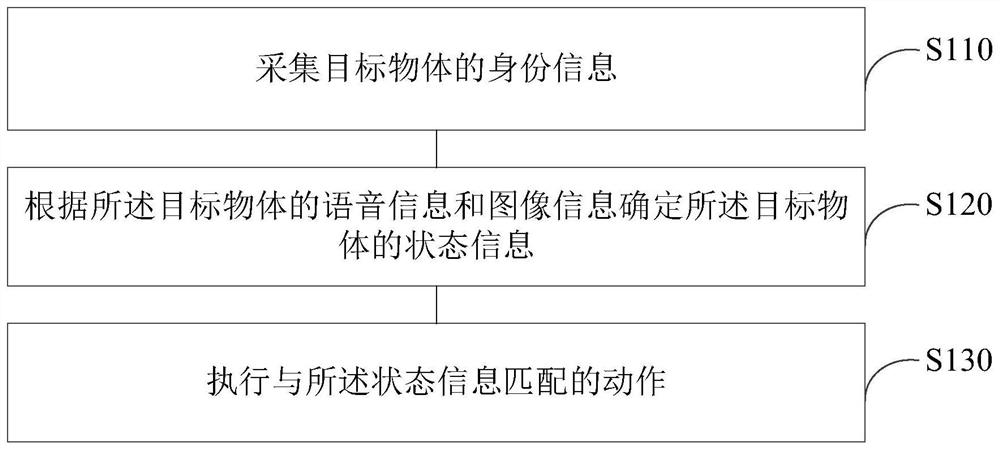
[0047] see figure 2 , figure 2 It shows a schematic flowchart of the robot control method provided by the embodiment of the present application, the method is applied to a robot, and the robot may be a virtual robot or a real robot, and the method may include steps S110 to S130.
[0048] Step S110: Collect the identity information of the target object.
[0049] In some embodiments, the identity information of the target object may include voice information and image information. The present application may use a voice collection device to collect voice data of the target object. The voice collection device may be a pickup, which may be installed on a robot, or may be installed outside the robot. In addition, the present application can also use an image acquisition device to collect image information of the target object, wherein the image acquisition device can be a color camera or an infrared camera, etc., and the image acquisition device can be built into the robot or a...
no. 2 example
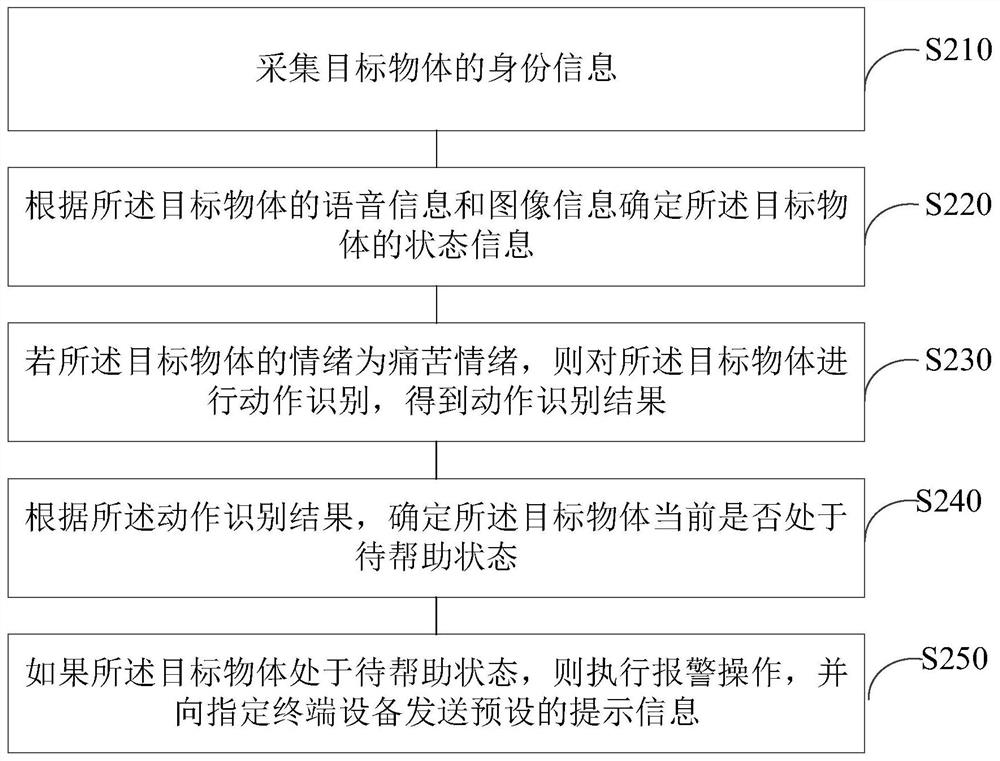
[0066] see image 3 , image 3 It shows a schematic flowchart of the robot control method provided by the embodiment of the present application, the method is applied to a robot, and the robot may be a virtual robot or a real robot, and the method may include steps S210 to S250.
[0067] Step S210: Collect the identity information of the target object.
[0068] Step S220: Determine the state information of the target object according to the voice information and image information of the target object.
[0069] As a manner, step S210 to step S220 have been introduced in detail in the above-mentioned embodiments and will not be repeated here.
[0070] In the embodiment of the present application, the target object may be the first type of person. After the robot determines the state information of the target object according to the voice information and image information of the target object, it may determine the target according to the emotional data contained in the state in...
no. 3 example
[0079] see Figure 4 , Figure 4 It shows a schematic flowchart of the robot control method provided by the embodiment of the present application, the method is applied to a robot, and the robot may be a virtual robot or a real robot, and the method may include steps S310 to S330.
[0080] Step S310: Collect the identity information of the target object.
[0081] Step S320: Determine the state information of the target object according to the voice information and image information of the target object.
[0082] Step S330: If the emotion of the target object is sad, play a preset audio or perform a dancing operation.
[0083] In some implementations, the target object can be the first type of person, and the application can determine whether the emotion of the target object is a sad emotion according to the acquired emotional data, and if it is determined that the emotion of the target object is a sad emotion, then play a preset audio or Perform dance operations. Wherein, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com