Path planning method and device based on ship angular velocity limitation
A technology of path planning and angular velocity, which is applied in the directions of measuring devices, instruments, surveying and navigation, etc., can solve the problems of ship instability and no consideration of ship angular velocity, etc., and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
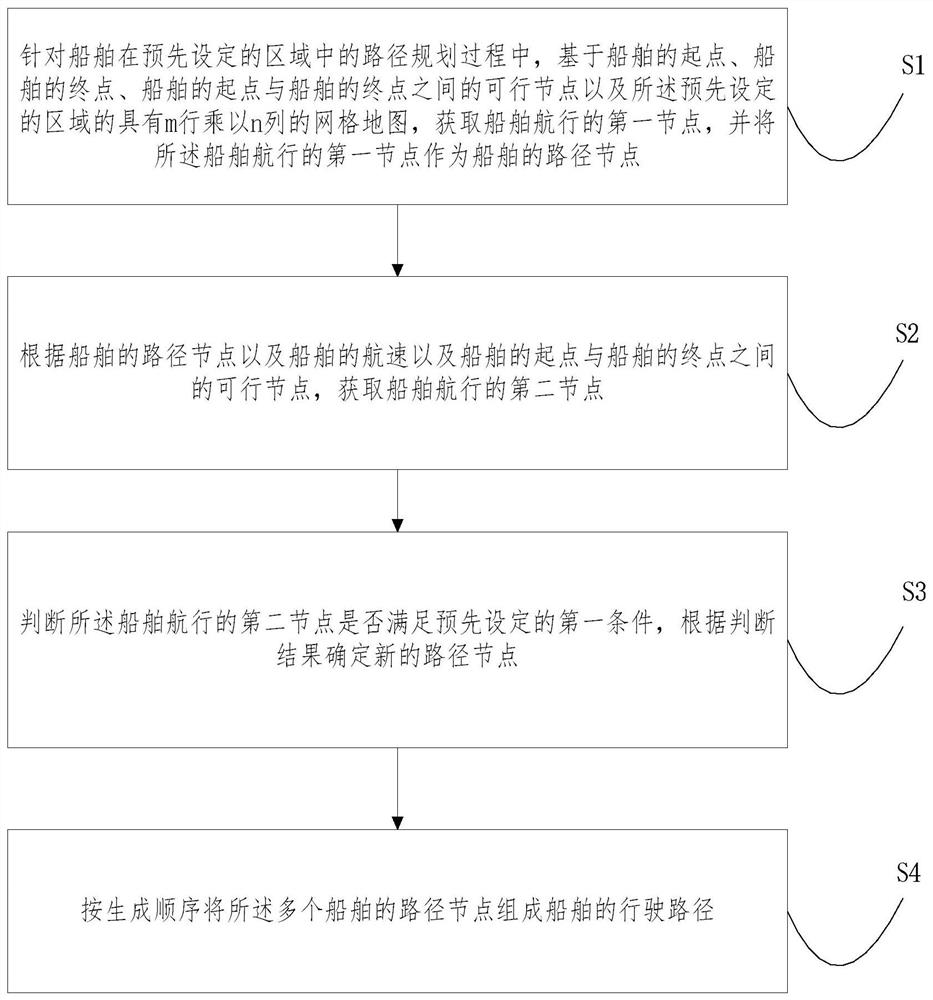
[0065] This embodiment provides a path planning method based on ship angular velocity limitation, including:
[0066] S·0. According to the electronic chart of the preset area, obtain the feasible area and the unfeasible area of the ship.
[0067] There are no obstacles in the feasible area.
[0068] There are obstacles in the infeasible area.
[0069] Preferably, said S.0 includes:
[0070] A rasterized map model of the preset area is established according to the electronic chart of the preset area.
[0071] The rasterized map model is read, a grid map with m rows multiplied by n columns is obtained, and a feasible area and an unfeasible area in the grid map are determined. The grid map has m×n grids.
[0072] S.1. Determine the starting point of the ship, the end point of the ship, and the feasible distance between the starting point and the end point of the ship according to the feasible area and the unfeasible area of the ship, as well as the preset initial startin...
Embodiment 2
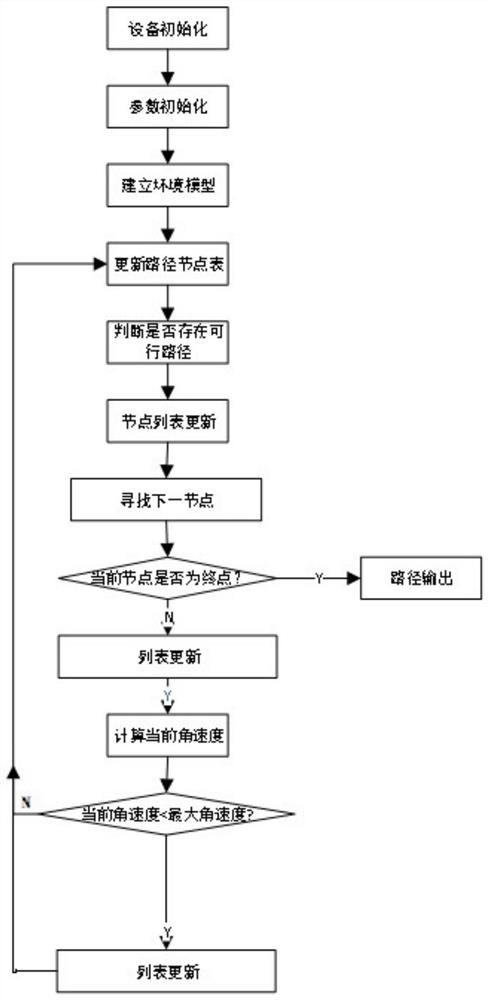
[0113] see figure 2 , a path planning method based on ship angular velocity limitation is adopted in the second embodiment, including:
[0114] In the preparatory stage of the second embodiment, a route planning method based on ship angular velocity limitation performs step S0 in advance, and obtains the feasible area and the unfeasible area of the ship according to the electronic chart of the preset area.
[0115] There are no obstacles in the feasible area.
[0116] There are obstacles in the infeasible area.
[0117] Determine the starting point of the ship, the end point of the ship, and the feasible nodes between the starting point of the ship and the end point of the ship according to the feasible area and the unfeasible area of the ship and the preset initial starting point and initial end point of the ship.
[0118] Wherein, step S0 specifically includes: step 1 to step 5.
[0119] Step 1: Device initialization.
[0120] Step 2: read in the electronic chart of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com