


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Dynamic feedback automatic adjustment lower limb rehabilitation robot
A rehabilitation robot and automatic adjustment technology, applied in passive exercise equipment, sports accessories, gymnastics equipment, etc., can solve problems such as troublesome operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
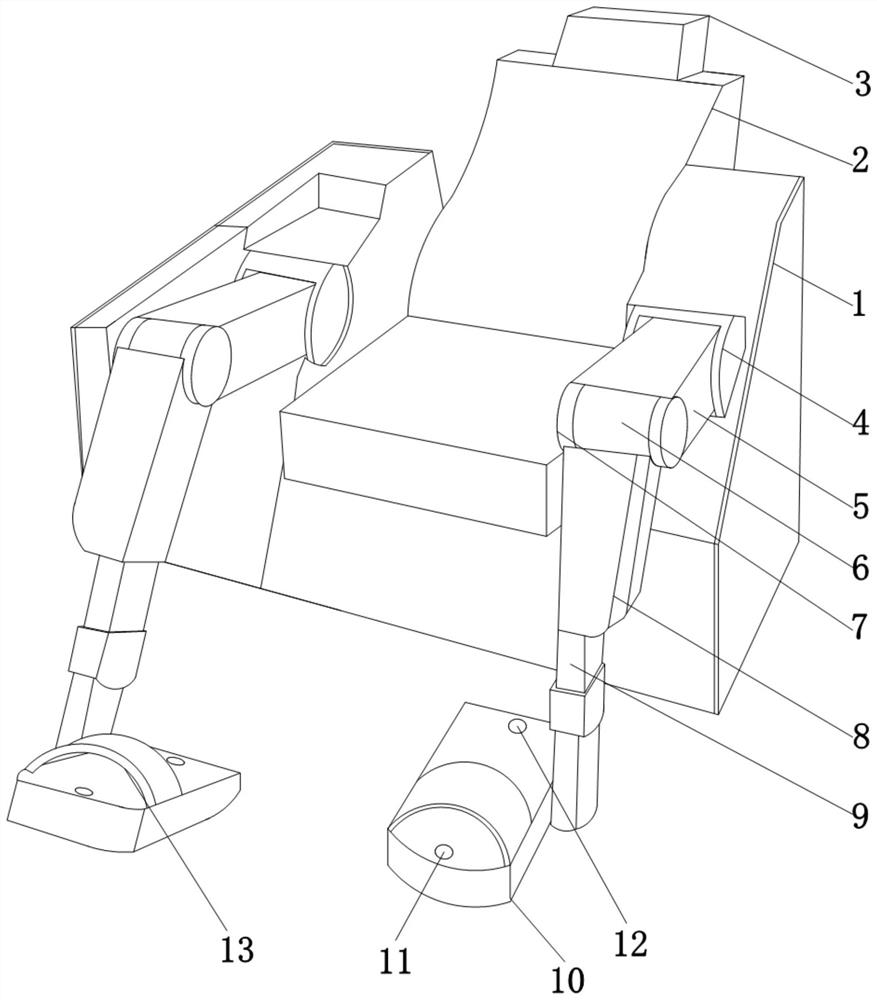
[0030] Such as Figure 1-4 As shown, a dynamic feedback automatic adjustment lower limb rehabilitation robot includes a seat 1. The seat 1 is provided with a soft cushion 2. The top of the soft cushion 2 is provided with a pillow 3. The rehabilitation device for patients with bone injuries is combined with the seat 1. In the recovery process like this, the patient can sit and stand on the soft cushion 2, or lie on the soft cushion 2 and the pillow 3, which reduces the support of the patient's hands, reduces the burden on the patient's body, and increases the leg training of the patient The length of time, thereby ensuring the rapid recovery of patients.
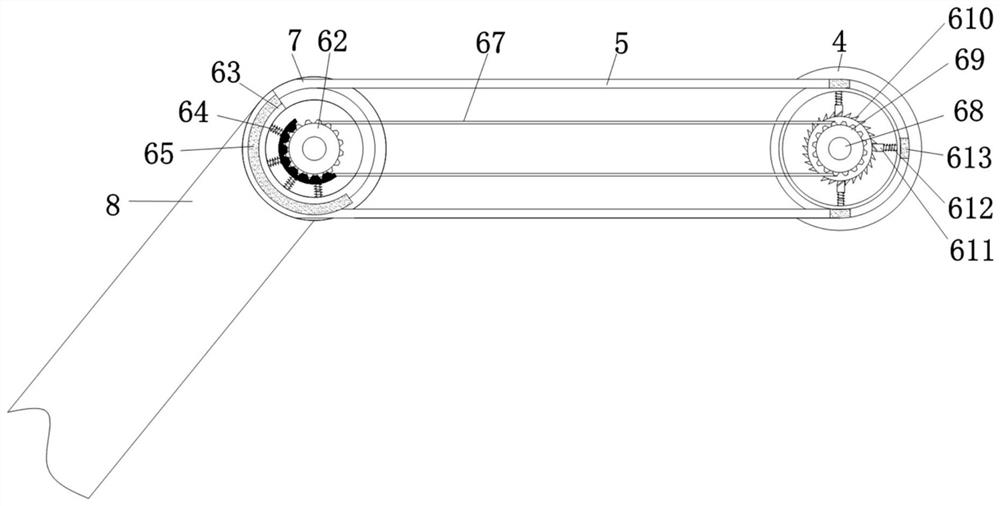
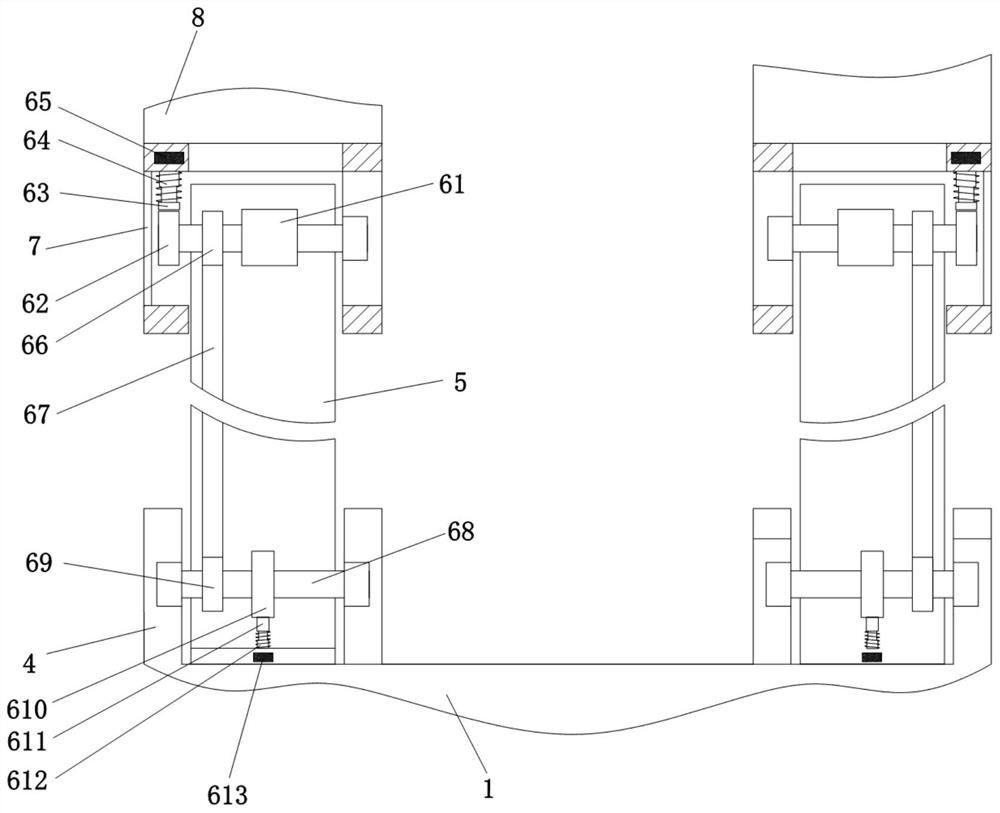
[0031] The left and right armrests of the seat 1 are provided with a group of first joints 5, one end of the first joint 5 is connected to the seat plate 4 fixed on the seat 1, and the other end of the first joint 5 is movably connected with a second joint 8, and the second joint 8 The two joints 8 are provided with rotating...
Embodiment 2
[0034] The applicant has found in practice that the above-mentioned solution still has the following problems: some patients’ legs can only be lifted at a small angle due to limb stiffness, and if the biaxial motor 61 still rotates to drive the first joint 5 or the second joint 8 When rotating, not only is it easy for the patient to bear a large force, causing secondary damage, but also due to the reaction force of the patient's legs, the biaxial motor 61 will be blocked, causing the motor to burn out or reduce its lifespan. In order to solve this problem, the biaxial motor 61 of the present application is electrically connected to the governor, and the governor monitors the output current of the biaxial motor 61 in real time. , the output current of the biaxial motor 61 gradually increases. In order to effectively protect the patient during the process of lifting the legs, a feedback threshold is set for the output current monitoring value of the biaxial motor 61. When the out...
Embodiment 3
[0036] In order to adapt to patients with different leg lengths, the extension bar 9 includes a slide plate 93, and the inner side of the second joint 8 is provided with a movable groove, and the slide plate 93 is sleeved in the movable groove, and two slide bars 94 are interspersed on the slide plate 93. The upper and lower ends are respectively fixedly connected with the upper and lower sides of the inner wall of the movable groove, the slide bar 94 is sleeved with a downward pressure spring 95, the outer side of the slide plate 93 is fixedly connected with a connecting plate 92, and the bottom end of the connecting plate 92 is fixedly connected with a foot bar 91 . Due to the influence of the patient's sitting posture and the length of the legs, the patient can step down on the pedal 10 as needed, so that the extension rod 9 can move down on the slide bar 94 and squeeze the depressing spring 95. In such a process On the one hand, the length of the extension rod 9 can be adj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com