


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A robot station design method applied to welding line
A design method and robot technology, applied in welding equipment, metal processing equipment, auxiliary welding equipment, etc., to achieve the effect of flexible and efficient production, reasonable conception, reasonable and accurate design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
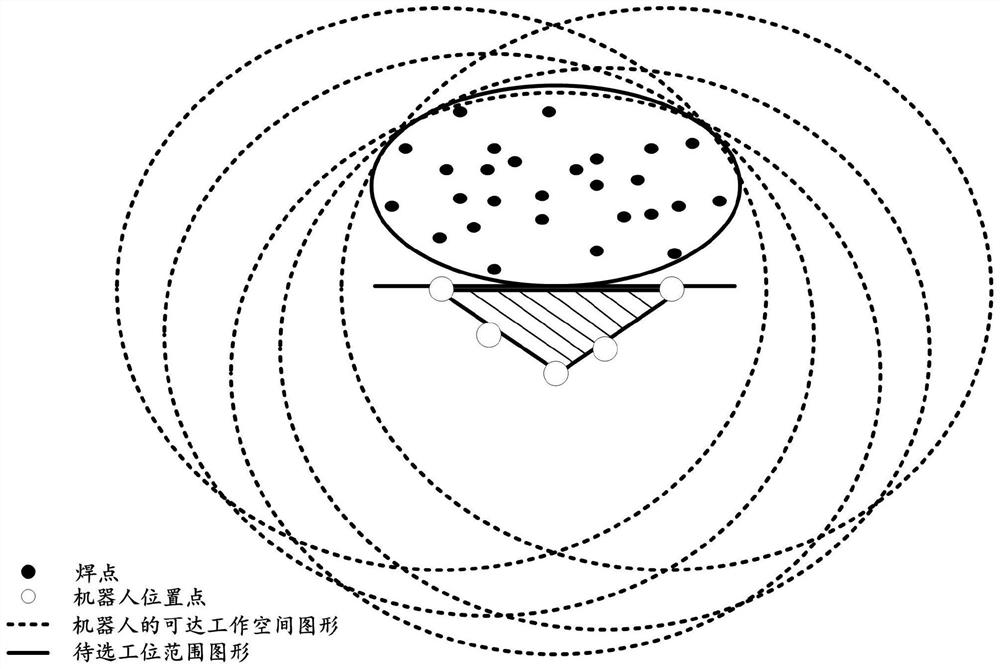
[0021] The invention provides a robot station design method applied to a welding line, which solves the problems of long time-consuming welding movement posture and high energy consumption existing in the placement of traditional robot stations. It should be emphasized that the robot station design method applied to welding lines proposed by the present invention is not only applicable to automobile welding lines, but also applicable to welding lines of other products. The basic content of the design method of the present invention is: at first, determine the reachable work space figure of welding point distribution range figure and robot; The set of station points to be selected is obtained by segmenting blocks step by step; finally, the optimal station point selection is realized by using the evaluation function based on the operability index and the distance index, and the station design of the welding robot is completed. The technical solutions of the present invention wil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com