Climbing robot with magnetic adsorption device
A magnetic adsorption and robot technology, applied in the field of climbing robots, can solve the problems of large size, high labor intensity, high maintenance cost, etc., and achieve the effect of reducing its own weight, avoiding safety hazards, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical means, creative features, objectives and effects of the invention easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations.
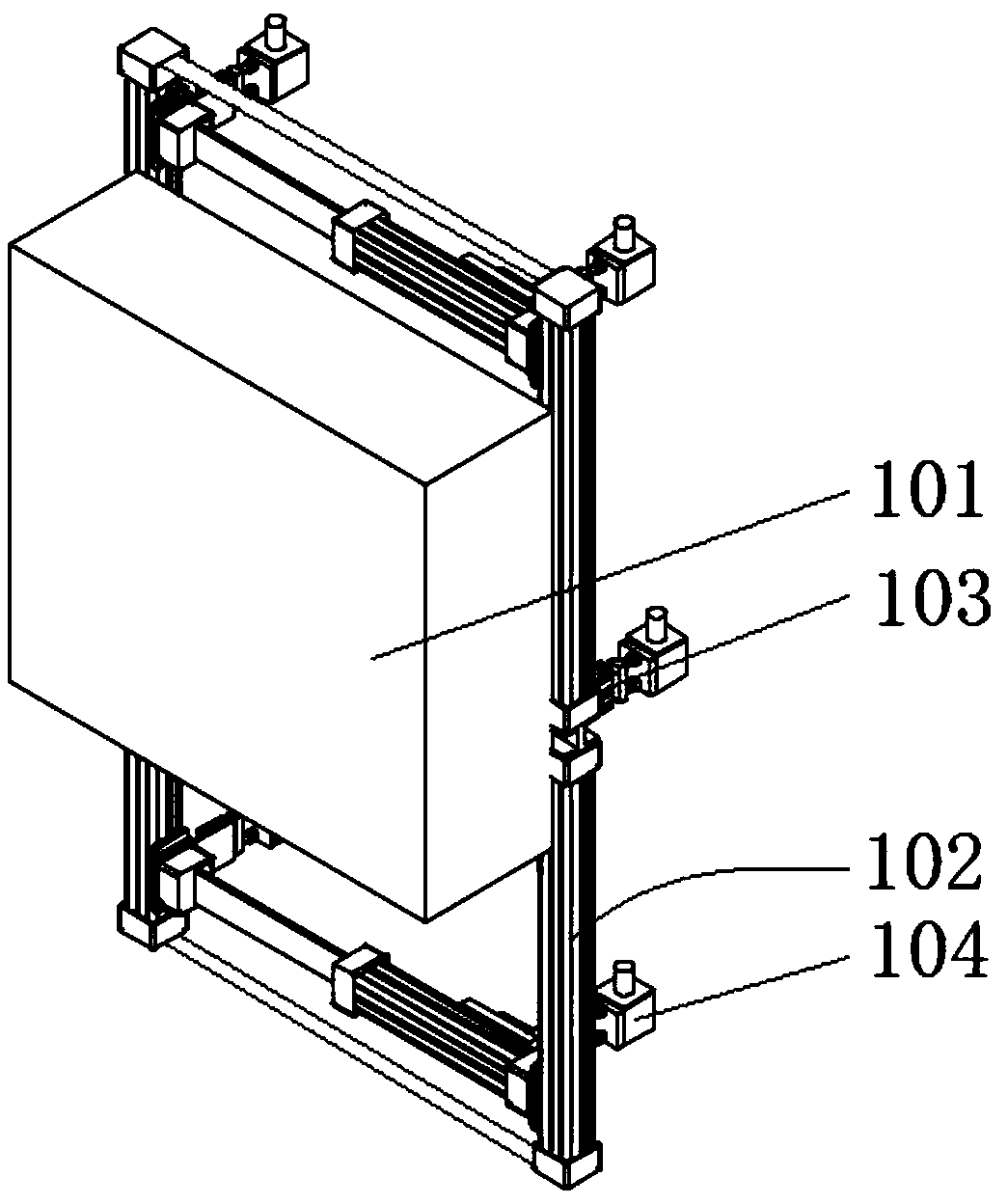
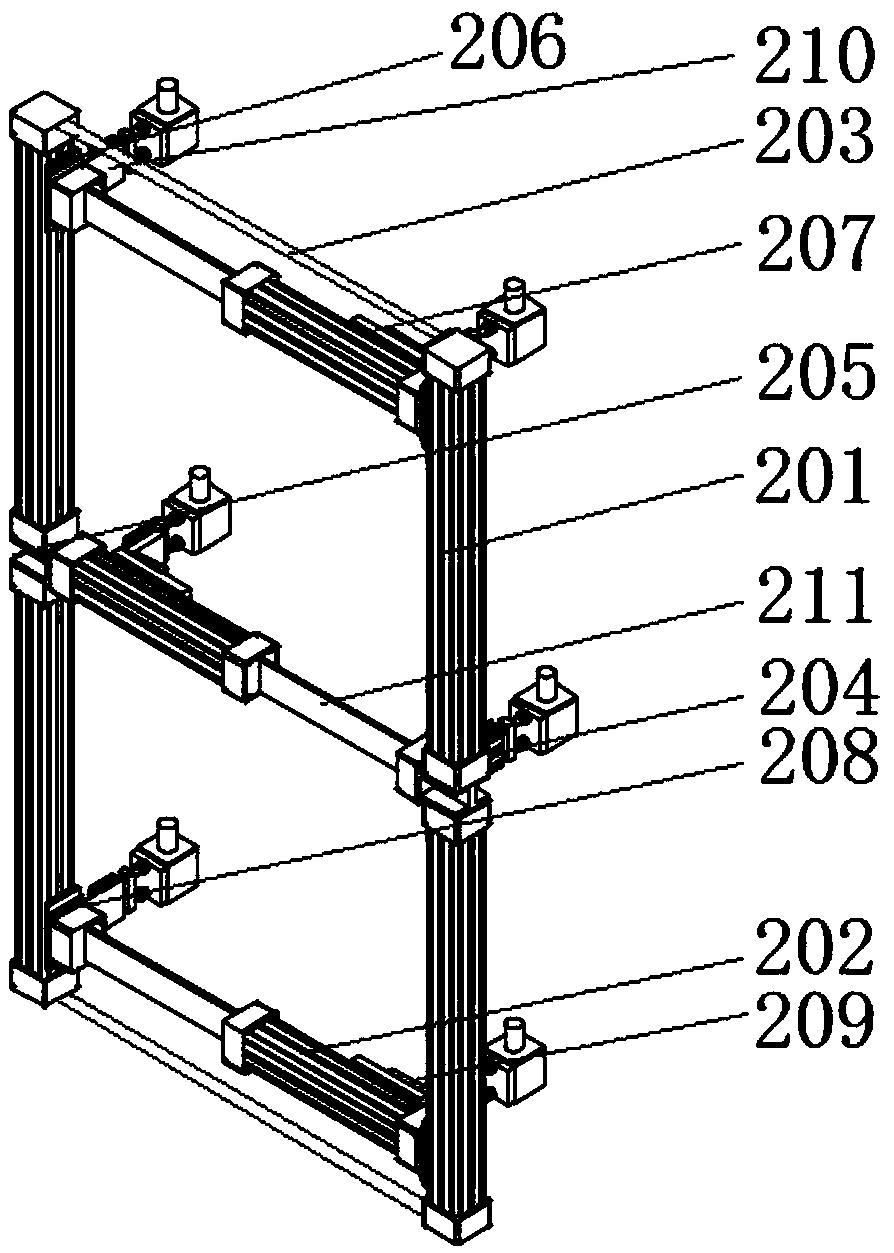
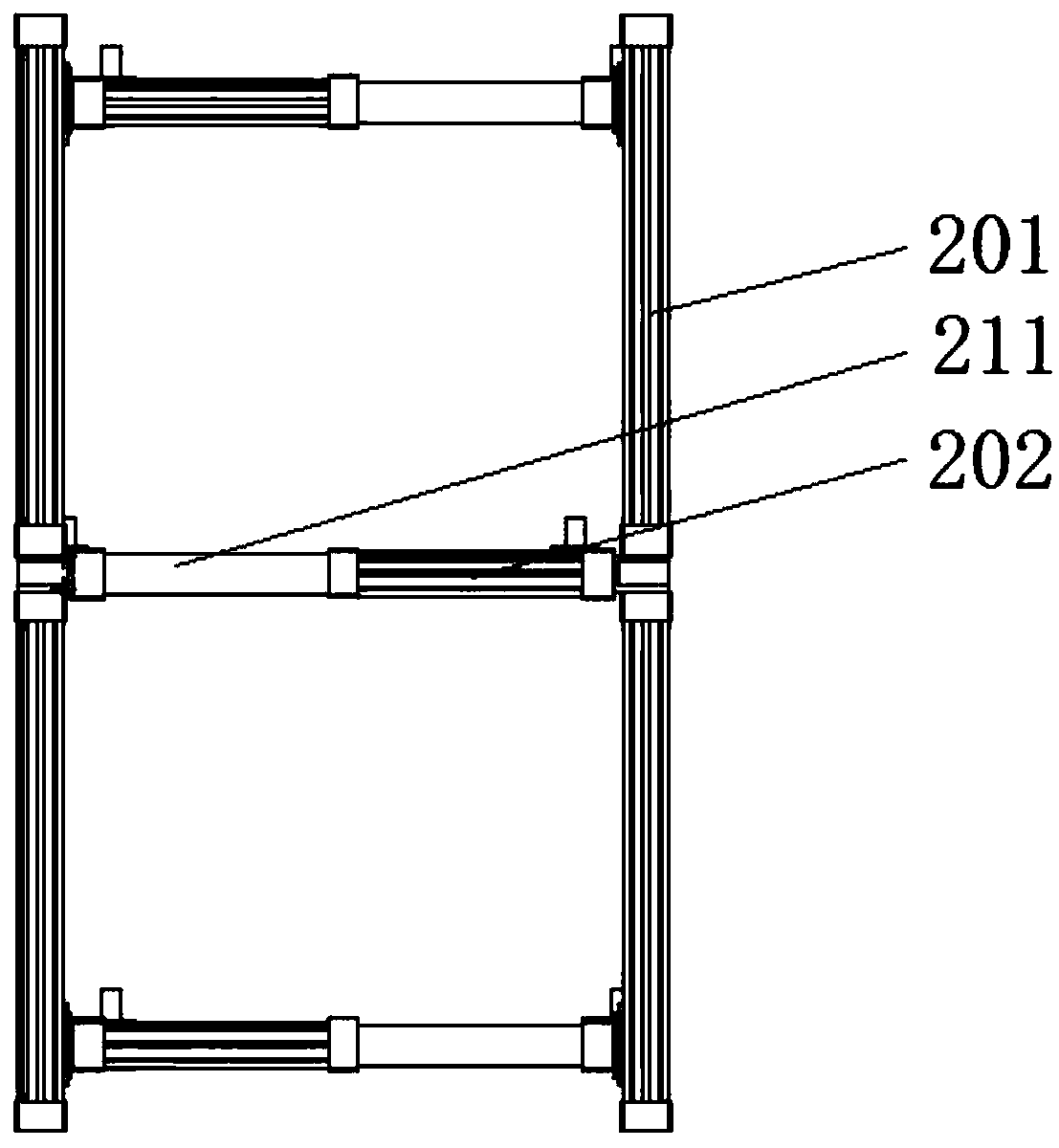
[0029] A preferred embodiment of the present invention is to provide a climbing robot equipped with a magnetic adsorption device. The purpose is to use the magnetic adsorption device as a gripping device to adsorb the climbing robot on the wind turbine tower and fix it at the working position to expand its functionality. Work, use the rodless cylinder bionic foot animal crawling principle to move up and down and turn to achieve the purpose of going to any position of the tower or other absorbable objects. The structure is simple, which greatly reduces the weight of the robot itself, making it flexible and convenient to work. The controller is controlled and worked by sending instructions from the control center, and the whole process is fully automated, com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com