Self-following type double-purpose fire-fighting robot
A fire-fighting robot and dual-purpose technology, which is applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of huge physical exertion of firefighters, delay in the best time for rescue, economic and personnel losses, etc., and achieve high stability High performance, simple structure, and the effect of reducing economic and personnel losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment approach ( 1
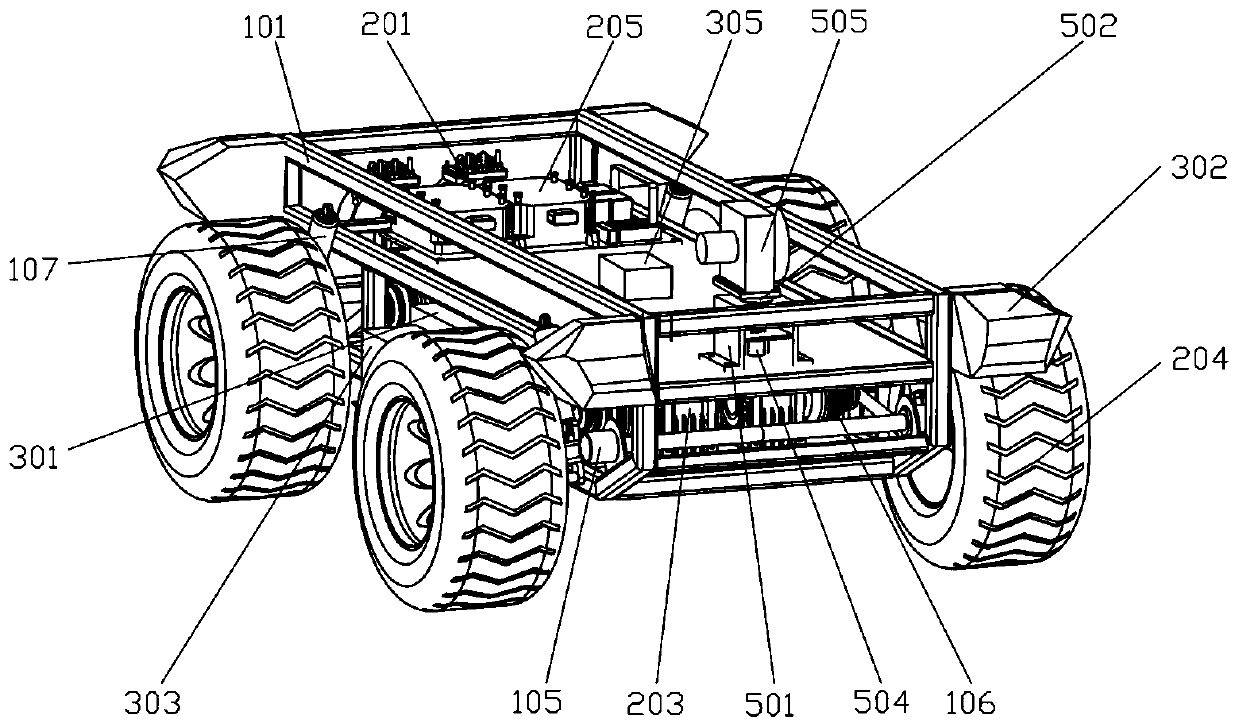
[0037] The robot is powered on through the power management system 303, and the firefighters place the fire-fighting materials on the upper surface of the robot of the present invention, and the personnel pull the traction device 500 of the present invention through the rope, and the personnel walk forward, driving the traction rope, and the traction rope triggers the present invention The rope displacement sensor 501, the rope displacement sensor 501 rotates in space with the moving direction and angle of the person, and feeds back the moving speed of the person to the rope displacement sensor 501, and inputs the direction and speed signals to the encoder 504, the encoder 504 writes the signal code, and transmits the written code to the main controller 305, the main controller 305 controls the driver assembly 205 to drive the DC motor 201 to rotate, and the DC motor 201 inputs power to each speed reducer 203, through After power conversion, the reducer 203 drives the ball cage...
Embodiment approach ( 2
[0039] Through the power management system 303, the robot is powered on, and the firefighters place the fire-fighting materials on the upper surface of the robot of the present invention, and the personnel send the control model to the main controller 305 through the remote handheld control terminal, and the main controller 305 controls the driver assembly 205 to drive The DC motor 201 rotates, and the DC motor 201 inputs power to each reducer 203. After the power is converted by the reducer 203, the ball cage coupling 202 is driven to rotate, and finally the wheel 204 is driven to rotate, thereby completing the function of transporting fire-fighting materials. Rear personnel can constantly monitor the working environment around the robot through the remote handheld control terminal. The radar 401 can sense the existence of obstacles around the robot. The radar 401 transmits the signal to the main controller 305, and the main controller 305 sends the radar 401 signal to the The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com