Integrated lateral and roll control method for autonomous driving distributed drive electric vehicles
A technology for autonomous driving and electric vehicles, which is applied in the field of automotive intelligent safety and automatic driving. It can solve the problems that actuators cannot provide torque and destroy the lateral motion control of distributed drive electric vehicles in automatic driving, so as to improve the performance of autonomous driving and overcome the impact Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
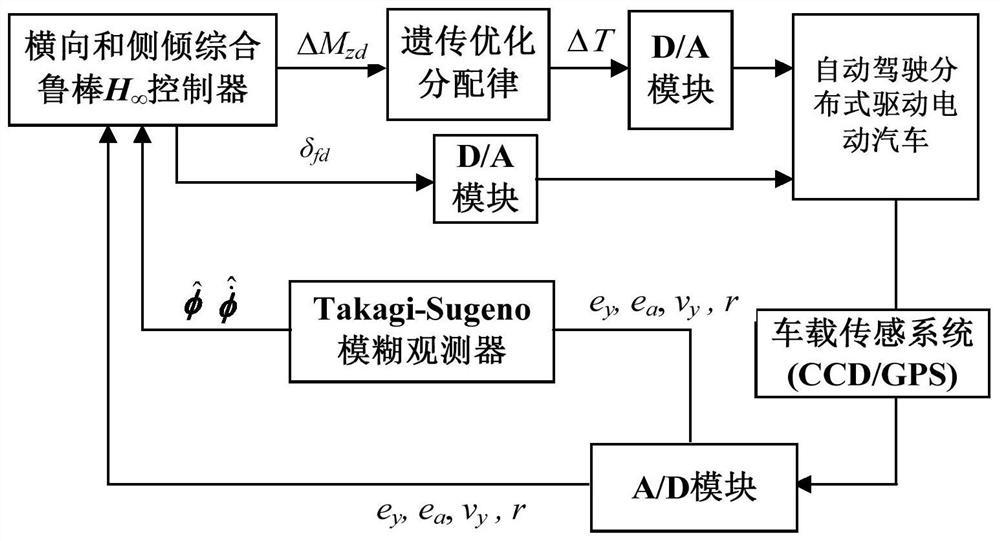
[0036] The lateral and roll comprehensive control system described in the embodiment of the present invention includes a vehicle-mounted sensor module, an A / D and a D / A converter module, a lateral and lateral comprehensive robust H ∞ Controller, genetic optimization optimal allocation module, Takagi-Sugeno fuzzy observer, etc. The vehicle-mounted sensor module mainly includes a GPS module and a CCD module. The GPS system obtains the longitudinal velocity, lateral velocity and yaw rate of the vehicle in real time, and the vehicle-mounted CCD system obtains the distance between the tangent direction of the reference path at the preview point and the vehicle forward direction in real time. The azimuth deviation information of the vehicle at the preview point and the lateral distance deviation information from the reference path; such as figure 1 As show...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com