Femoral artery automatic compression hemostasis robot
A femoral artery and robot technology, applied in the field of medical devices, can solve the problems of inability to accurately locate the bleeding point, such as autonomous and flexible hemostasis, and achieve the effects of reducing complications and braking time, reducing work intensity, and facilitating promotion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention.
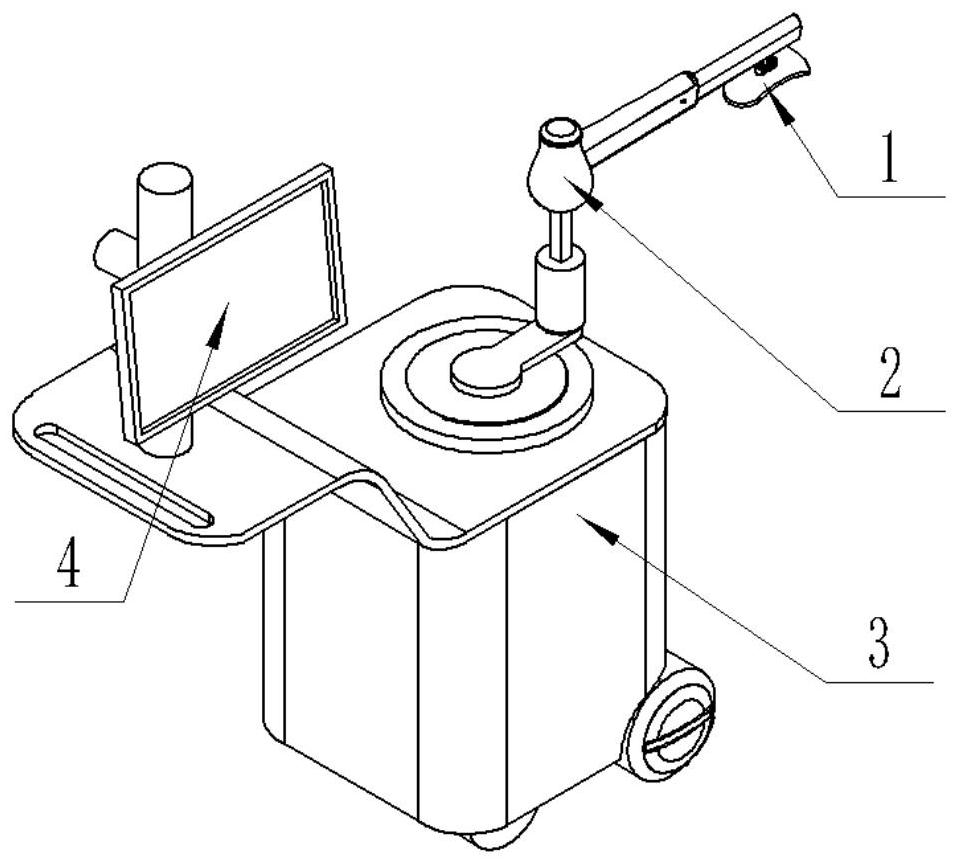
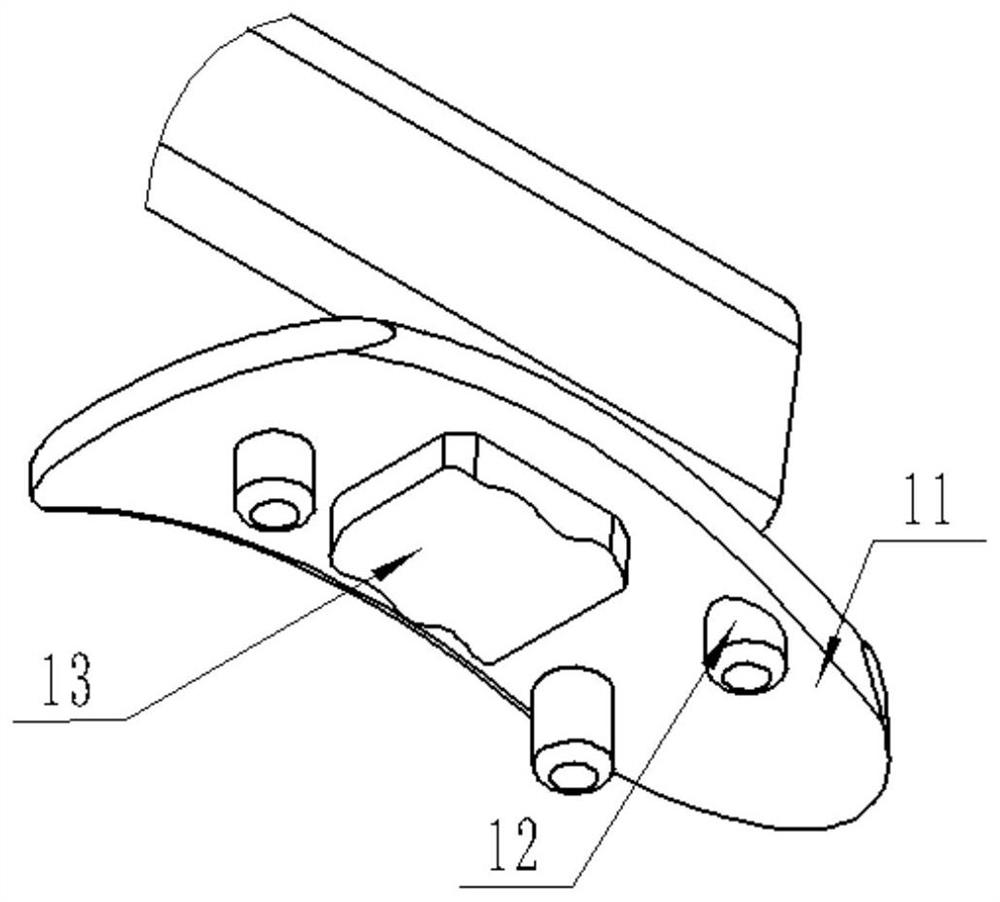
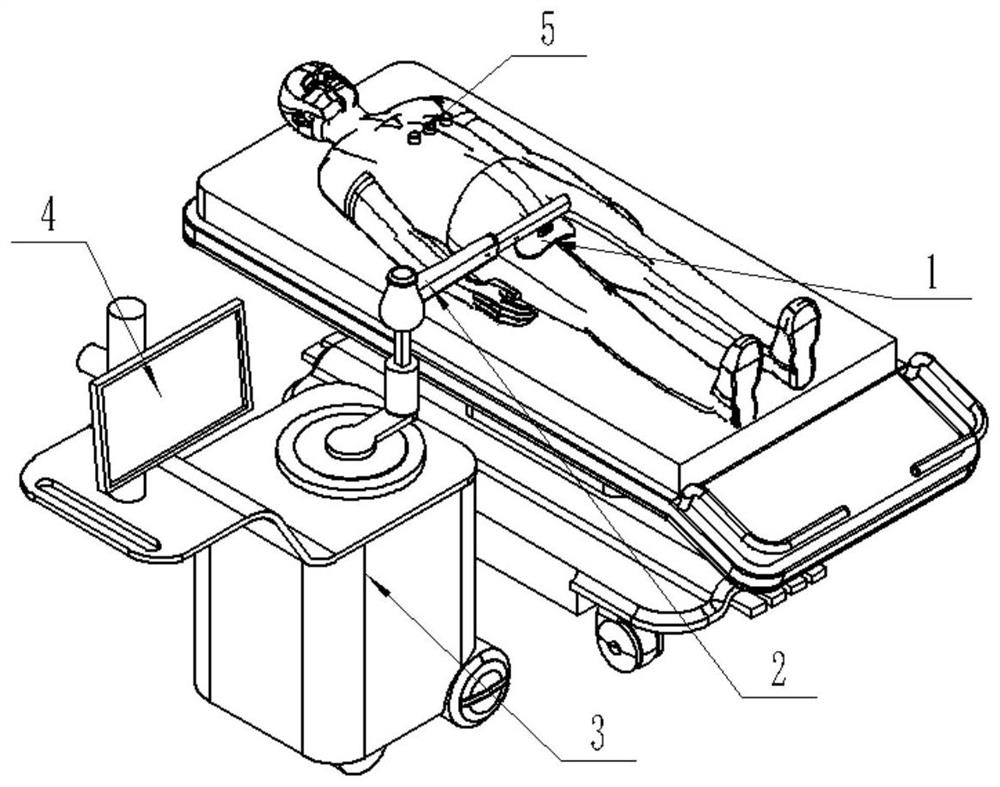
[0032] The present invention provides a femoral artery automatic pressing hemostasis robot, comprising a pressing hemostatic device, a multi-degree-of-freedom mechanical arm and a controller; both the pressing hemostatic device and the multi-degree-of-freedom mechanical arm are electrically connected to the controller or Through a wireless connection; the pressing hemostatic device is provided with a blood vessel bleeding point positioning component, and is used to detect blood vessel image information in the area to be hemostatic, so as to locate the exact position of the blood vessel bleeding point; the multi-degree-of-freedom mechanical arm an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com