A multifunctional underwater bionic robot
A bionic robot and multi-functional technology, applied in the field of bionic robots, can solve the problems of low efficiency of underwater bionic robots, and achieve the effect of low energy consumption and low noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
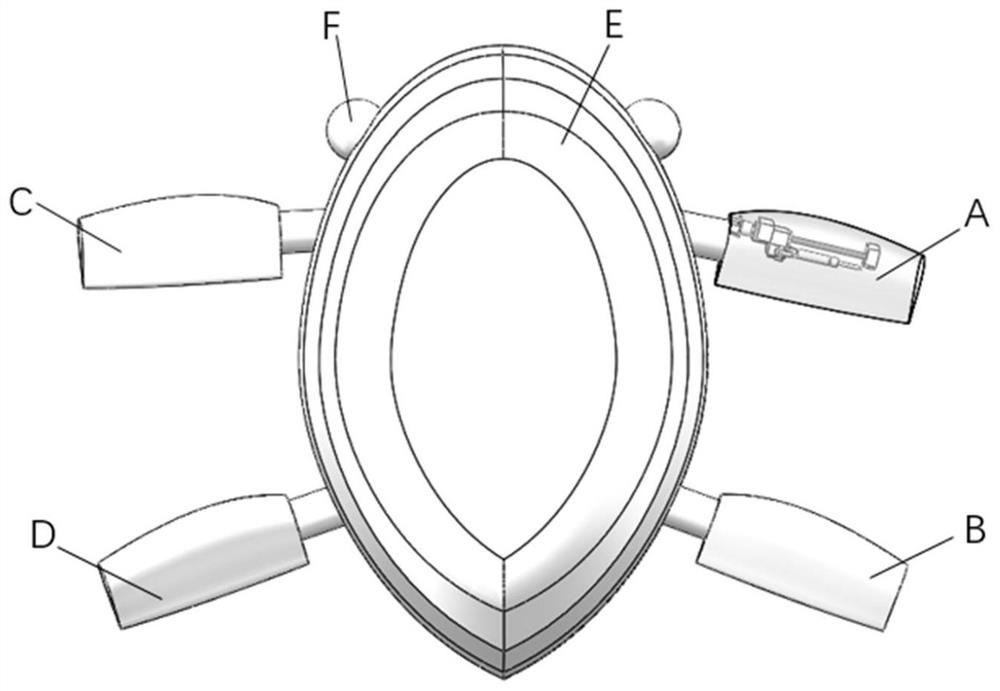
[0028] Such as Figure 1 to Figure 9 As shown, a multifunctional underwater bionic robot of this embodiment includes a main cabin body E, a reconnaissance device F, a first mechanical leg A, a second mechanical leg B, a third mechanical leg C and a fourth mechanical leg Mechanical legs D, control equipment can be installed in the main compartment of the present embodiment according to the actual use conditions, infrared sensors, cameras, etc. can be installed in the detection device according to the actual use conditions, the underwater robot of the present embodiment focuses on the mechanical legs, so the main The cabin and detection devices are not described in detail.
[0029] Such as figure 1 As shown, the reconnaissance device F is set on both sides of the front end of the main cabin body E; the first mechanical leg A, the second mechanical leg B, the third mechanical leg C, and the fourth mechanical leg D are respectively connected to the main cabin by screws On body E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com