Method, device and system for grabbing special-shaped component, control device and storage medium
A technology for grabbing devices and control devices, which is applied in the field of automation and can solve problems such as high production costs and low production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
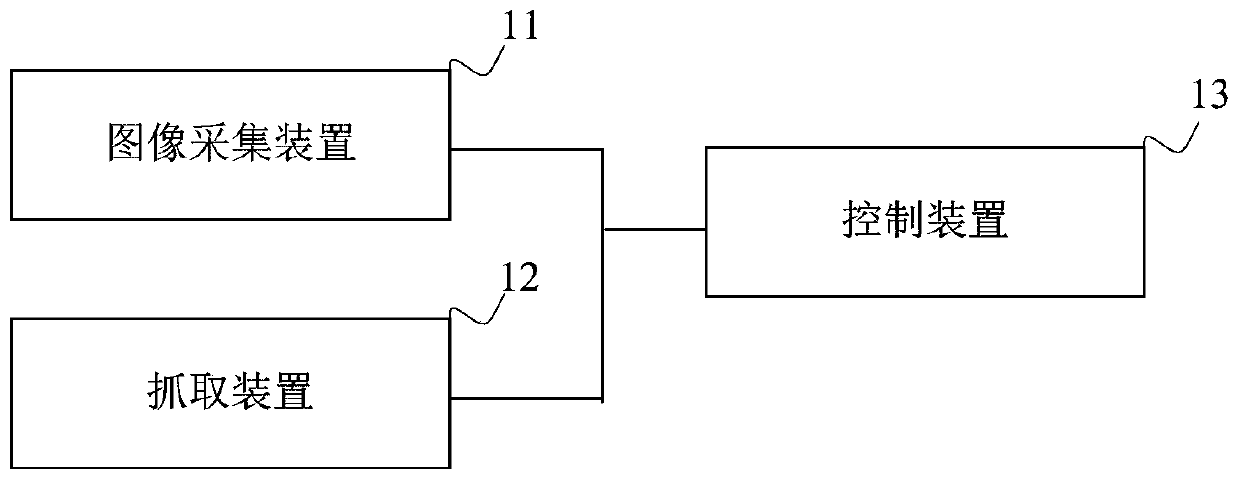
[0129] See figure 1 , is a schematic block diagram of the structure of a grabbing system for special-shaped components provided in the embodiment of the present application. The system may include a control device 11, a grabbing device 12 and an image acquisition device 13, and the control device is connected with the grabbing device and the image acquisition device respectively. connect.
[0130]Among them, the image acquisition device is used to collect images; the grabbing device is used to perform corresponding operations according to the control instructions of the control device; the control device is used to acquire the first image, and the first image includes special-shaped components and / or grabbing devices; according to the first An image generates a control instruction, and sends the control instruction to the grabbing device, and the control instruction is used to instruct the grabbing device to grab the target special-shaped component.
[0131] It can be underst...
Embodiment 2
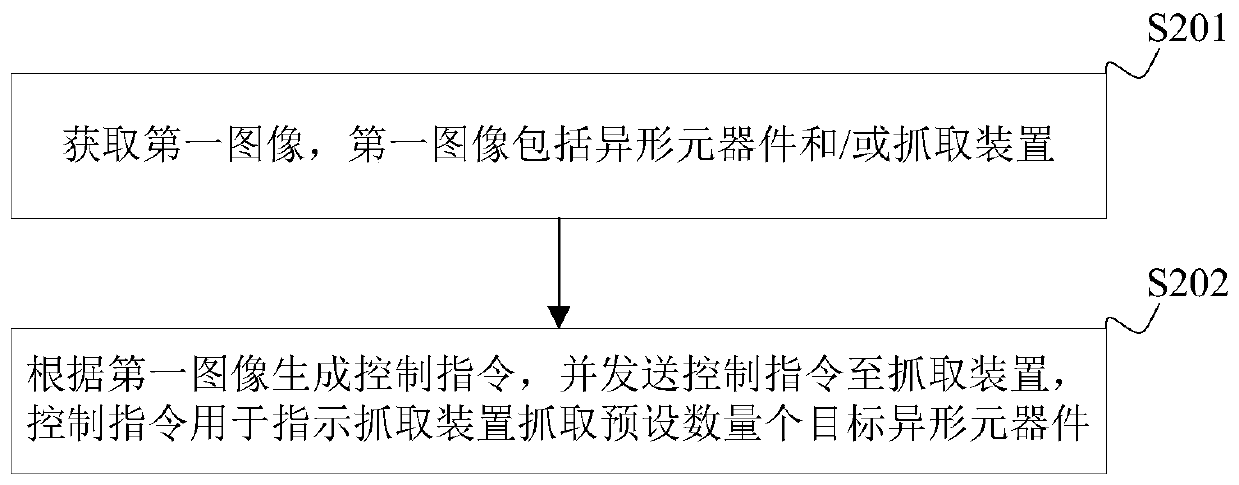
[0142] See figure 2 , which is a schematic flow diagram of a method for grasping special-shaped components provided in the embodiment of the present application, the method may include the following steps:
[0143] Step S201, acquiring a first image, where the first image includes special-shaped components and / or grabbing devices.
[0144] It should be noted that the above-mentioned grasping device refers to a device for grasping the above-mentioned special-shaped components, which may be but not limited to a robot arm. The above-mentioned first image may be an image including only special-shaped components, may be an image including only the grabbing device, or may be an image including both the special-shaped component and the grabbing device. Which image to collect can be rotated according to actual application requirements. Generally, the above-mentioned first image only includes images of special-shaped components, and the pose of the special-shaped components is recog...
Embodiment 3
[0156] Based on the first image, the AI algorithm can be used to directly give control instructions to control the grasping device to complete the grasping action of special-shaped components, or first identify the pose information, and then control the grasping device to complete the grasping of special-shaped components based on the pose information Take action.
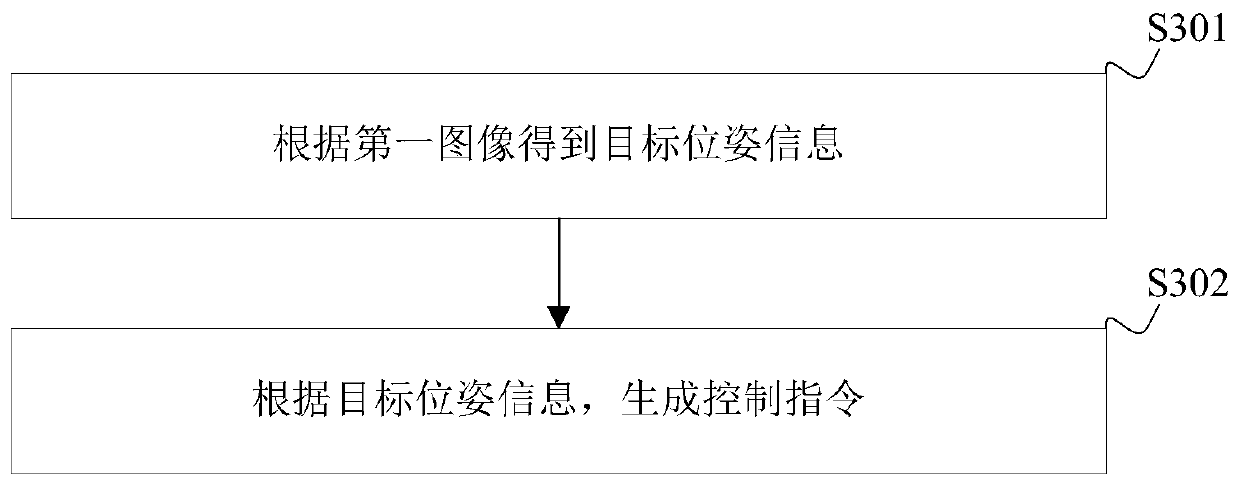
[0157] Based on the first embodiment above, in some embodiments, when the first image includes at least one special-shaped component, see image 3 Shown is a schematic block diagram of the process of step S202, the above-mentioned process of generating a control instruction according to the first image may specifically include:
[0158] Step S301. Obtain target pose information according to the first image.
[0159] It should be noted that the above-mentioned target pose information refers to information characterizing the position and posture of the special-shaped component, which may include but not limited to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com