Book management method based on autonomous mobile robot
A technology for book management and robotics, applied in the direction of instruments, computer parts, non-electric variable control, etc., can solve problems such as wrong shelves of library books, and achieve the effect of solving wrong shelves.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. .
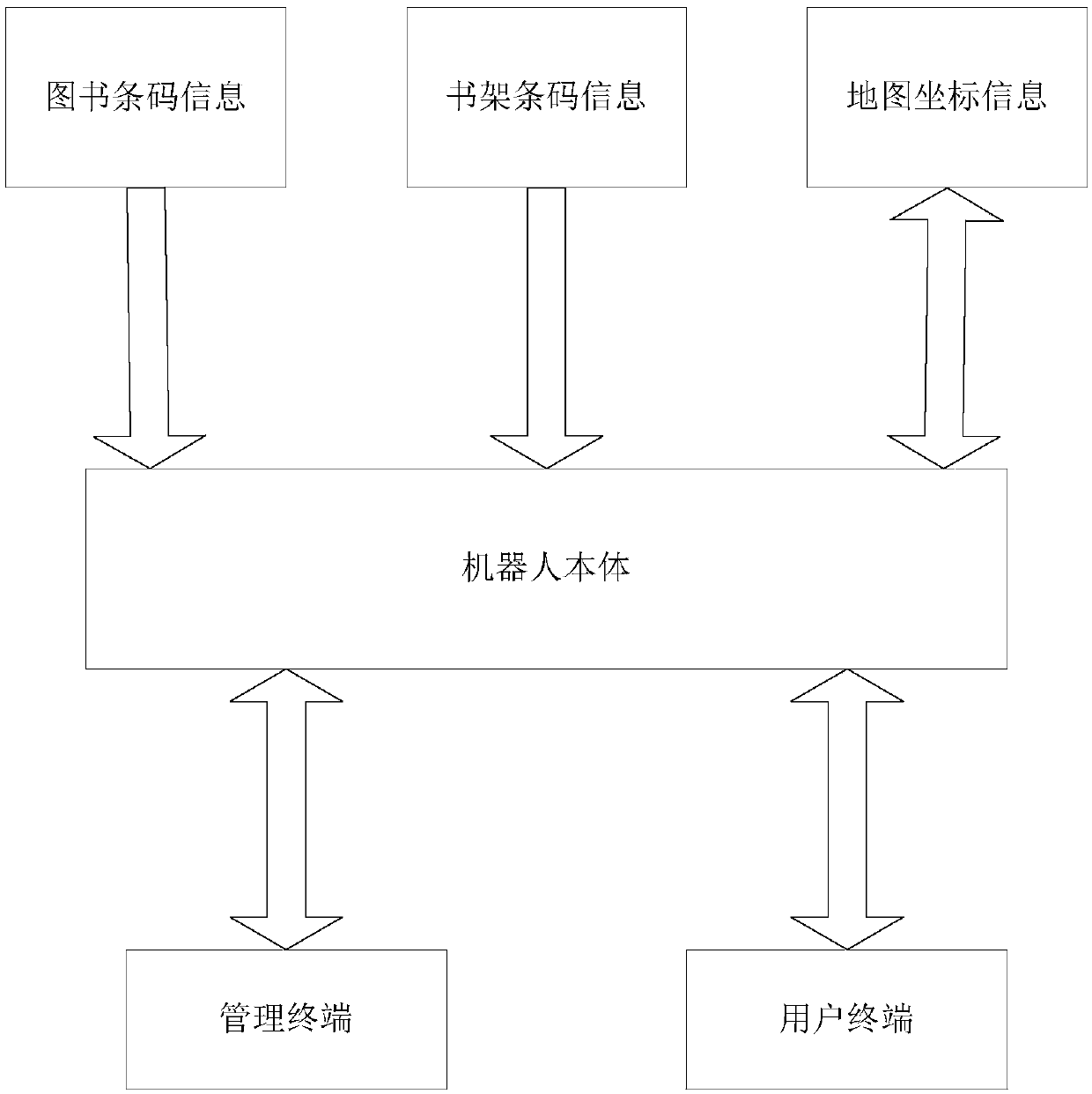
[0026] figure 1 It is an information flow diagram for the identification and search system of wrongly stacked books. The robot uses a scanning gun to obtain the barcode information of books and bookshelves, uses vision or laser sensors to obtain mapping information, and autonomously navigates to the designated location based on known location information during positioning. The management terminal and the user terminal transmit the control information to the robot body and receive the query results at the same time.
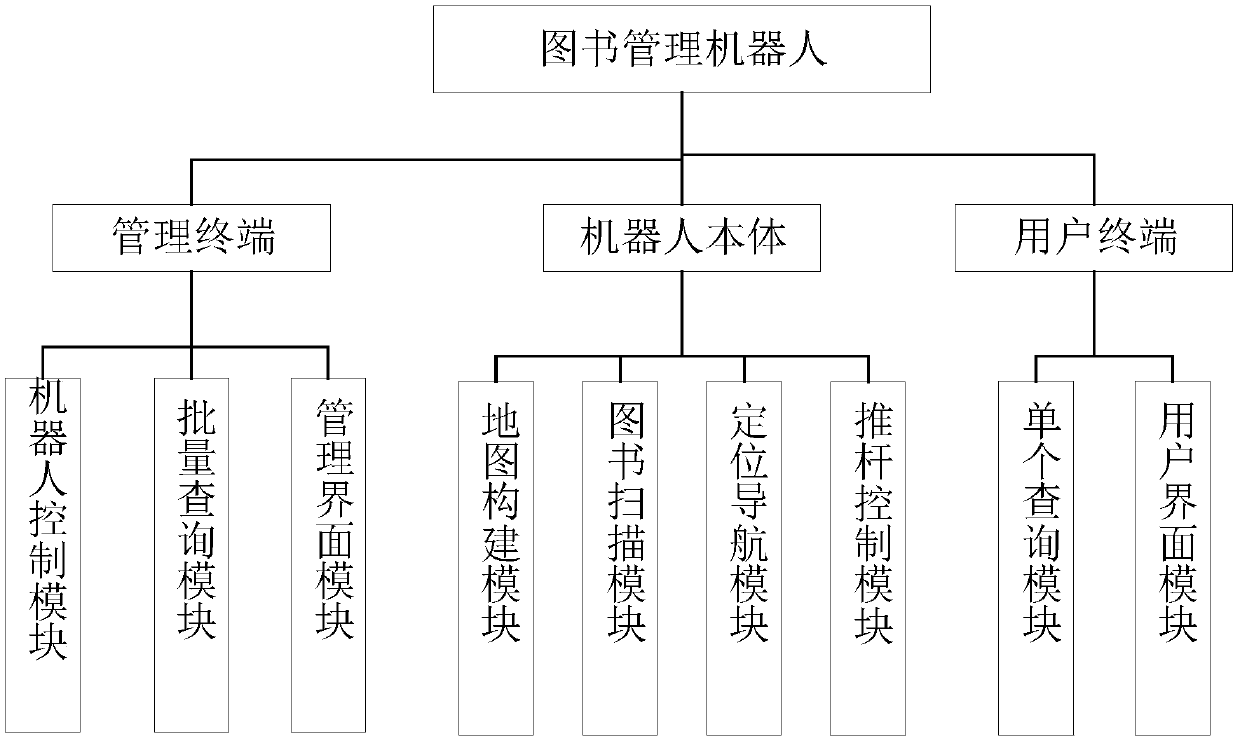
[0027] figure 2 It exemplarily shows the software structure diagram of the book positioning and searching system, which includes a robot control module, a batch query module, a management interface module, a map building module, a book scanning module, a positioning and navigation module, a linear actuator control module,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com