Unmanned cooperative detection method
A detection method and unmanned technology, applied in radio wave measurement systems, measurement devices, geophysical measurement and other directions, can solve problems such as easy to cause safety accidents, obstacles that cannot be detected by vehicles, and body obstructions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
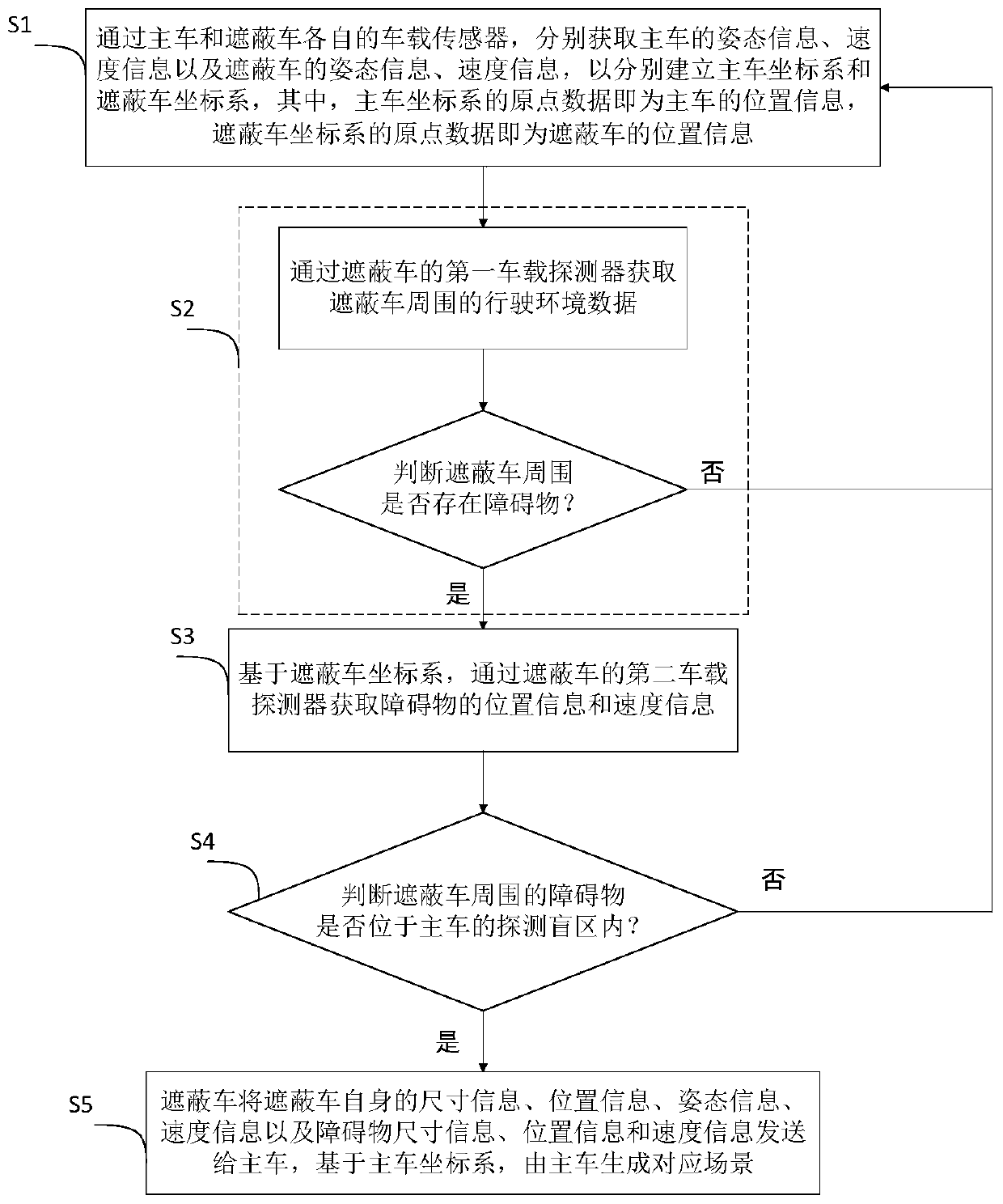
[0081] Such as figure 1 As shown, an unmanned cooperative detection method includes the following steps:
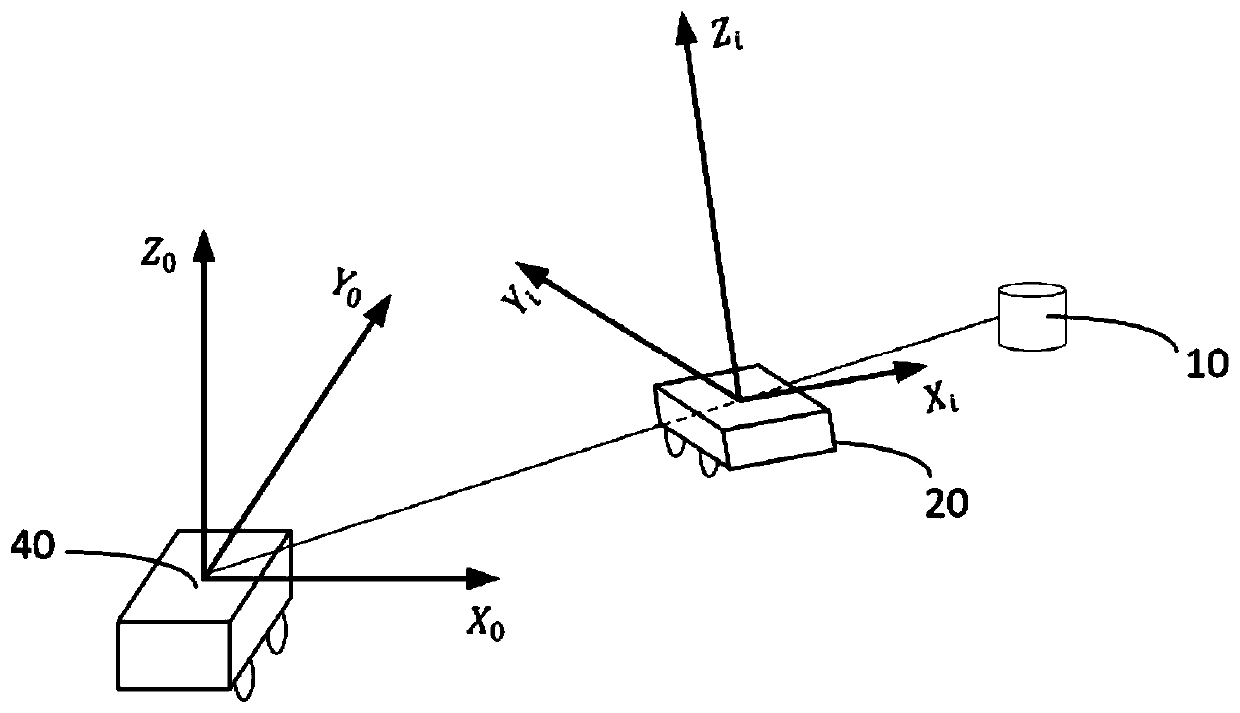
[0082] S1. Obtain the attitude information and speed information of the main vehicle and the attitude information and speed information of the shelter vehicle through the respective on-board sensors of the main vehicle and the shielding vehicle, so as to respectively establish the coordinate system of the main vehicle and the coordinate system of the shielding vehicle. Among them, the main vehicle The origin data of the coordinate system is the location information of the main vehicle, and the origin data of the masking vehicle coordinate system is the location information of the masking vehicle;
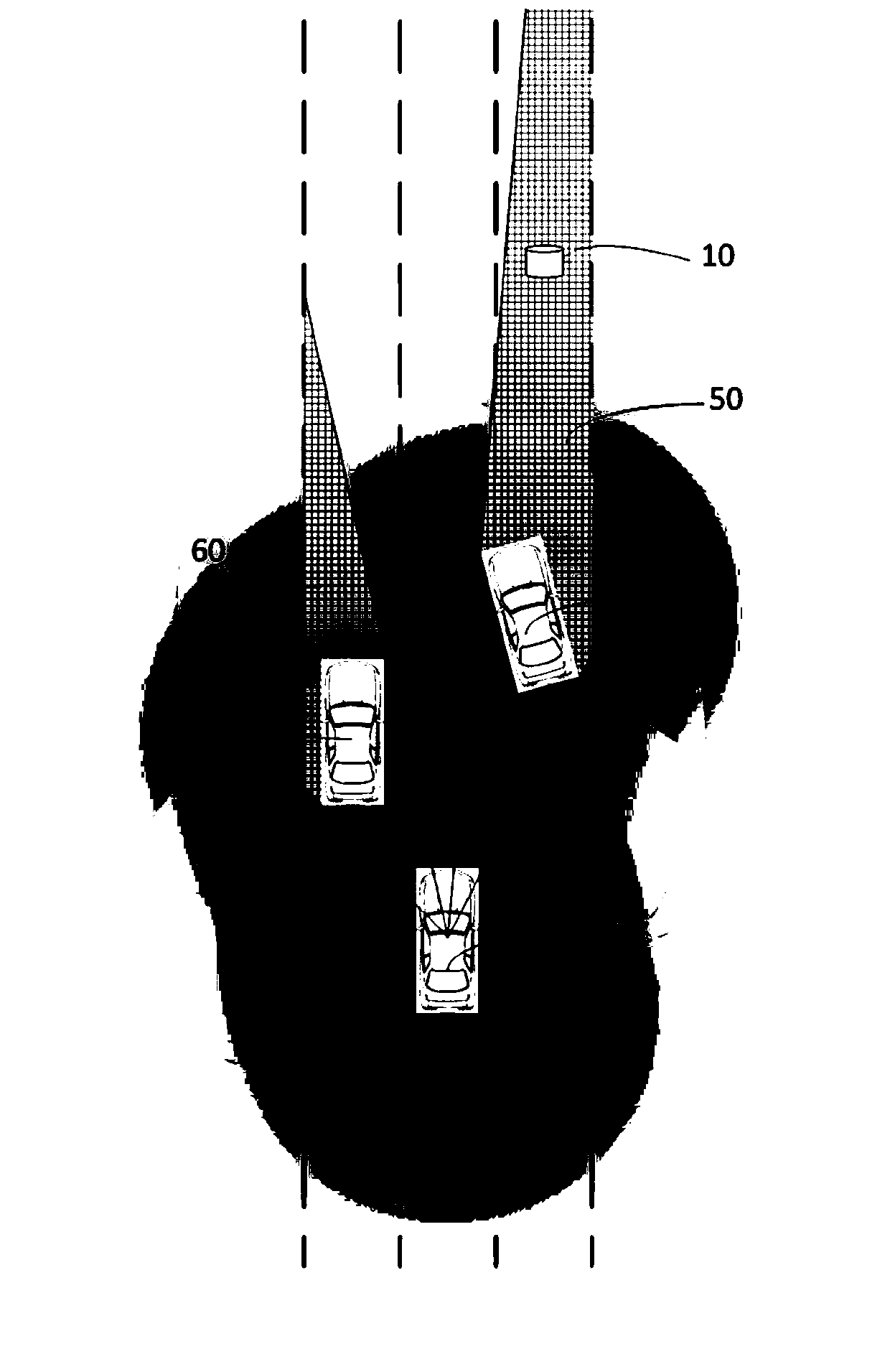
[0083] S2. Obtain the driving environment data around the sheltering car through the first vehicle-mounted detector of the sheltering car, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com