Predetermined performance control method based on finite time extended state observer
An extended state observation and finite time technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as singularity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
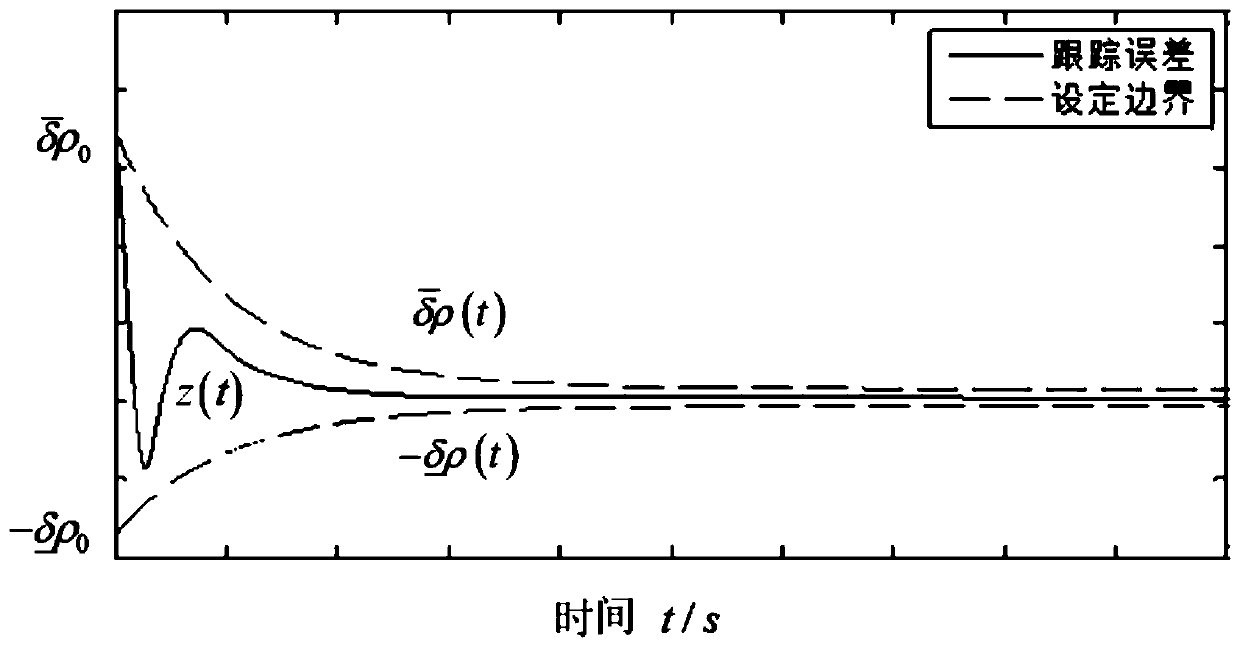
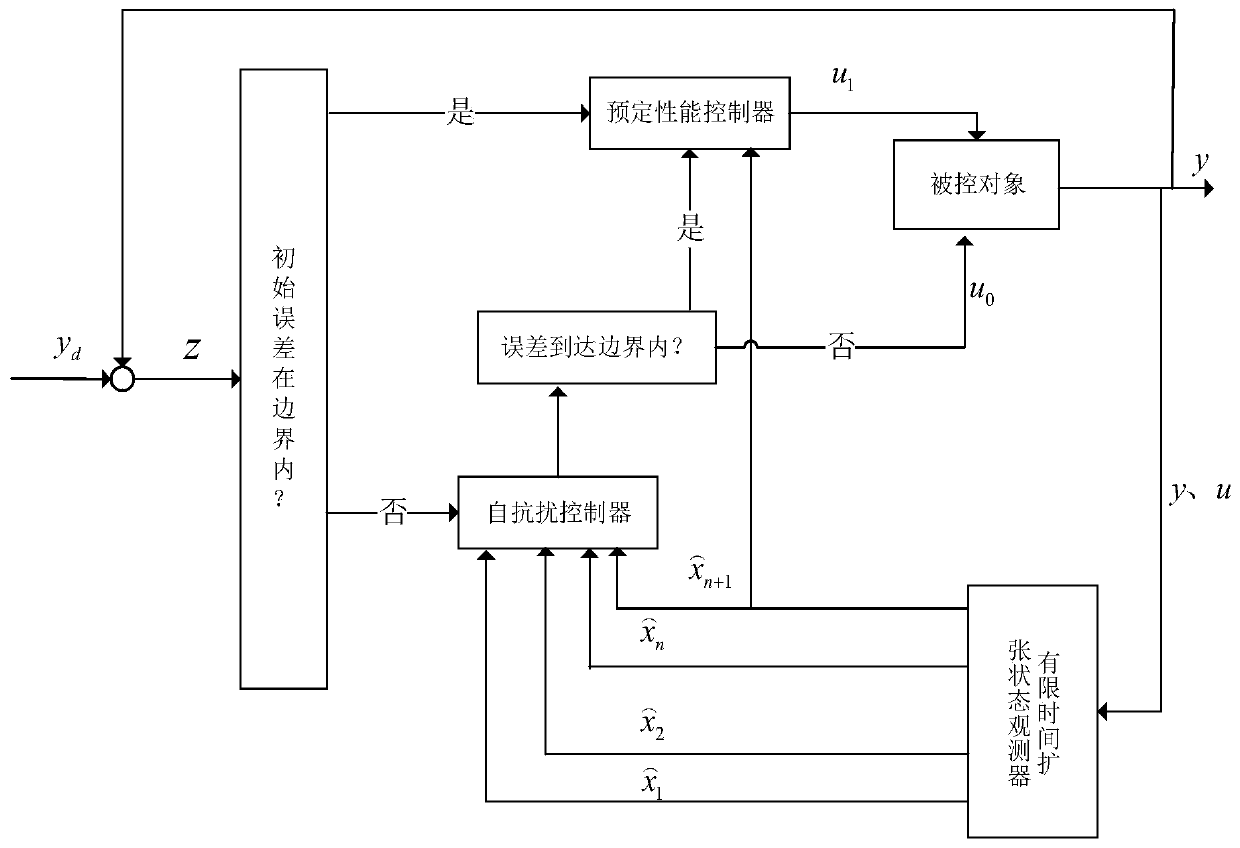
[0111] In order to overcome the shortcomings of the existing technology, a predetermined performance control method based on the finite-time extended state observer is proposed. This method can not only make the observation error of the extended state observer converge to zero in a limited time, but also make the tracking error follow the preset A certain transient (such as overshoot, convergence time) and steady-state performance (such as steady-state error) convergence. The technical scheme adopted in the present invention is a predetermined performance control method based on a finite time expansion state observer, including:
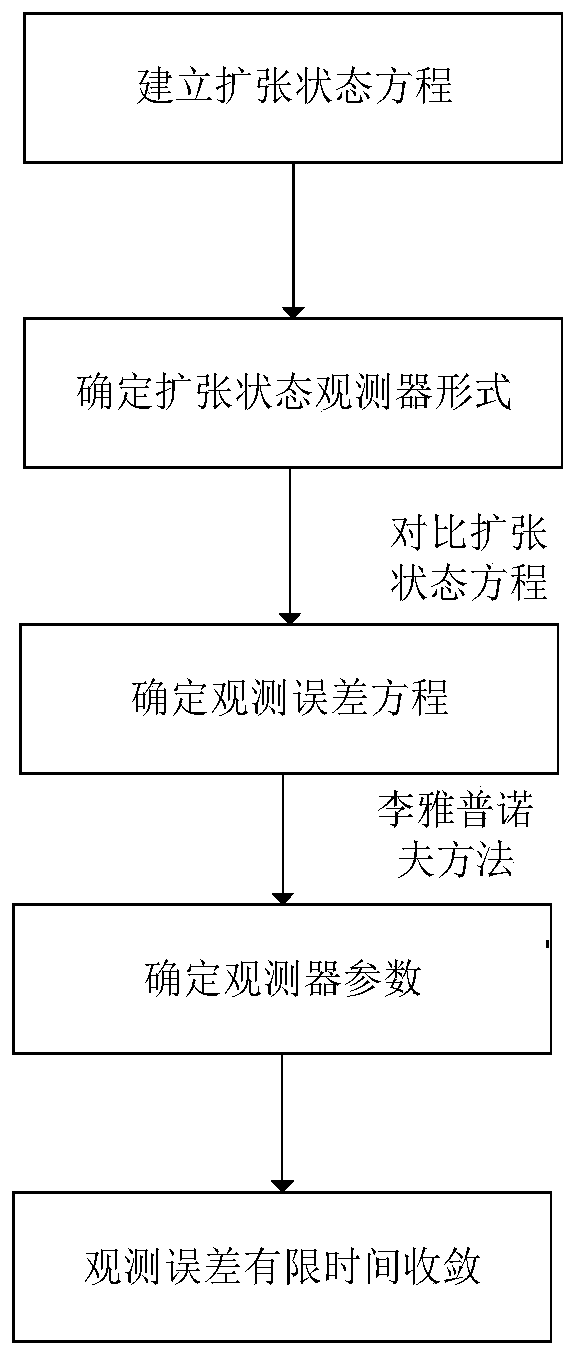
[0112] 1. n+1 order finite time extended state observer
[0113] In engineering practice, the dynamic model and control gain of the system are often difficult to establish and determine accurately, and there are various uncertainties. By introducing the concept of total disturbance, most industrial control systems can be modeled as a single-input si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com