Fixed-time adaptive neural network unmanned aerial vehicle track angle control method
A neural network and control method technology, applied in the field of fixed-time adaptive neural network UAV track angle control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0255] Example: UAV Track Angle Dynamics
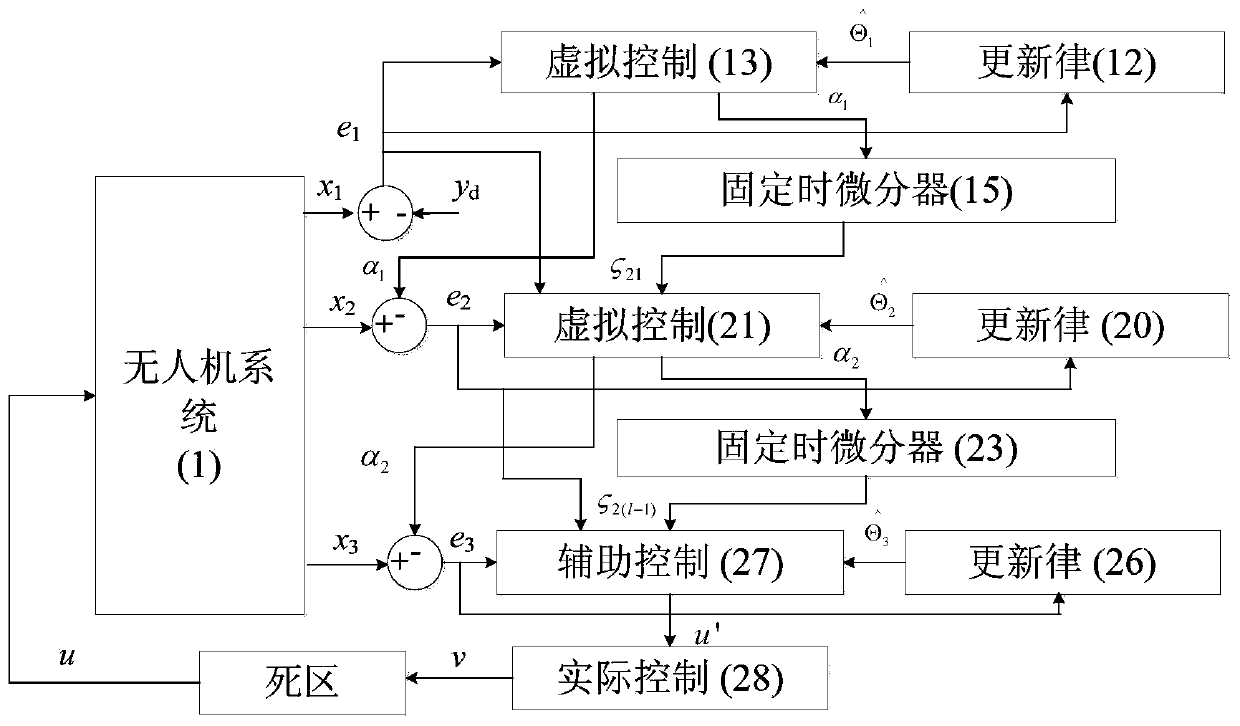
[0256] Taking UAV track angle dynamics as an example to illustrate the effectiveness of the above fixed-time adaptive neural network control method in realizing UAV track angle tracking ideal trajectory. The dynamics of UAV track angle can be expressed as:
[0257]
[0258] in and have
[0259]
[0260]
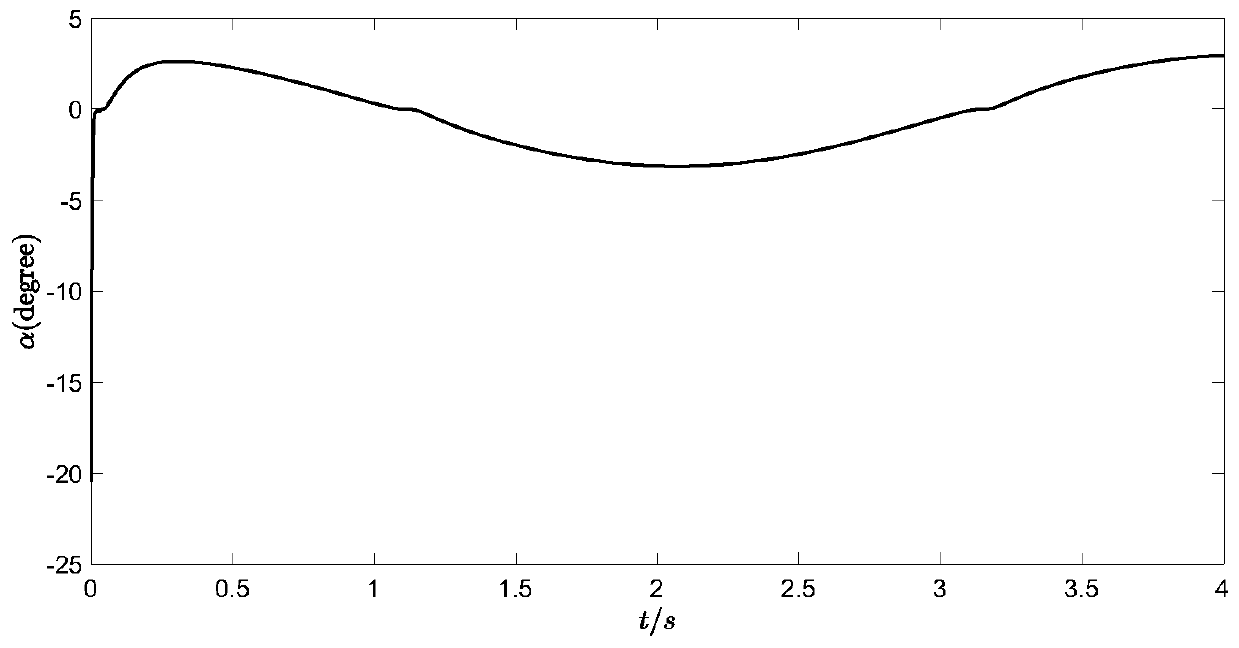
[0261] The system parameters are selected as V t =100m / s,F T =8000N, M=9295.44kg, S=27.87m 2 , I y =75673.6kg·m 2 , ρ=1.7g / L, The dead zone parameter is selected as m r =1,b r = 0.6°, m l =1.05,b l =-0.8°.
[0262] An adaptive neural network control method when a UAV track angle is dynamically fixed in this embodiment comprises the following steps:
[0263] (1) Determine the control target: the reference output signal is selected as y d =(10+2sin(0.5πt))°, the output is limited to |y|≤22°. The control objective is determined as the system output can track the reference output of the system within a fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com