Collaborative robot collision safety test system and test method
A technology of safety testing and testing systems, applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of high measurement work efficiency and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
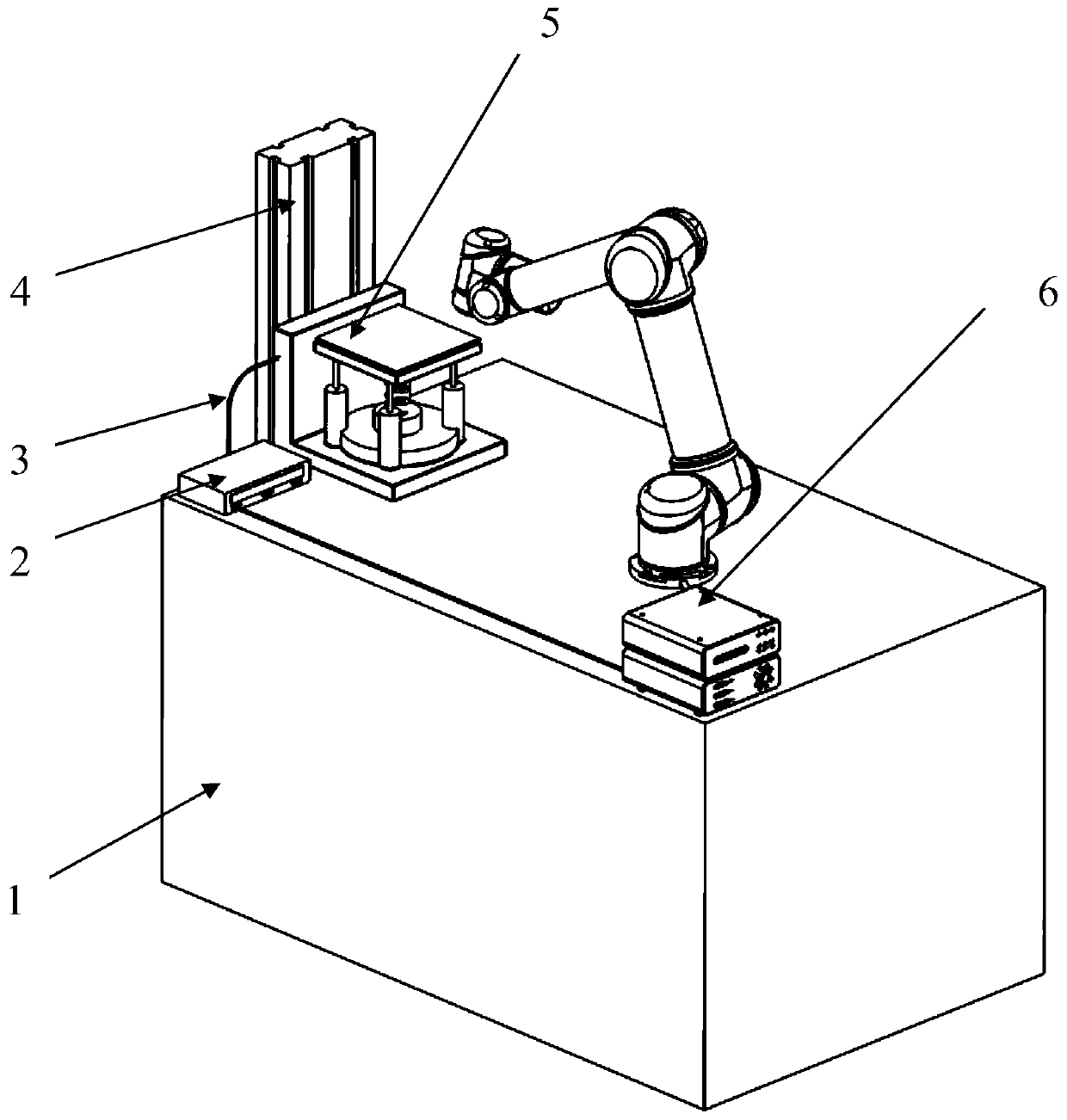
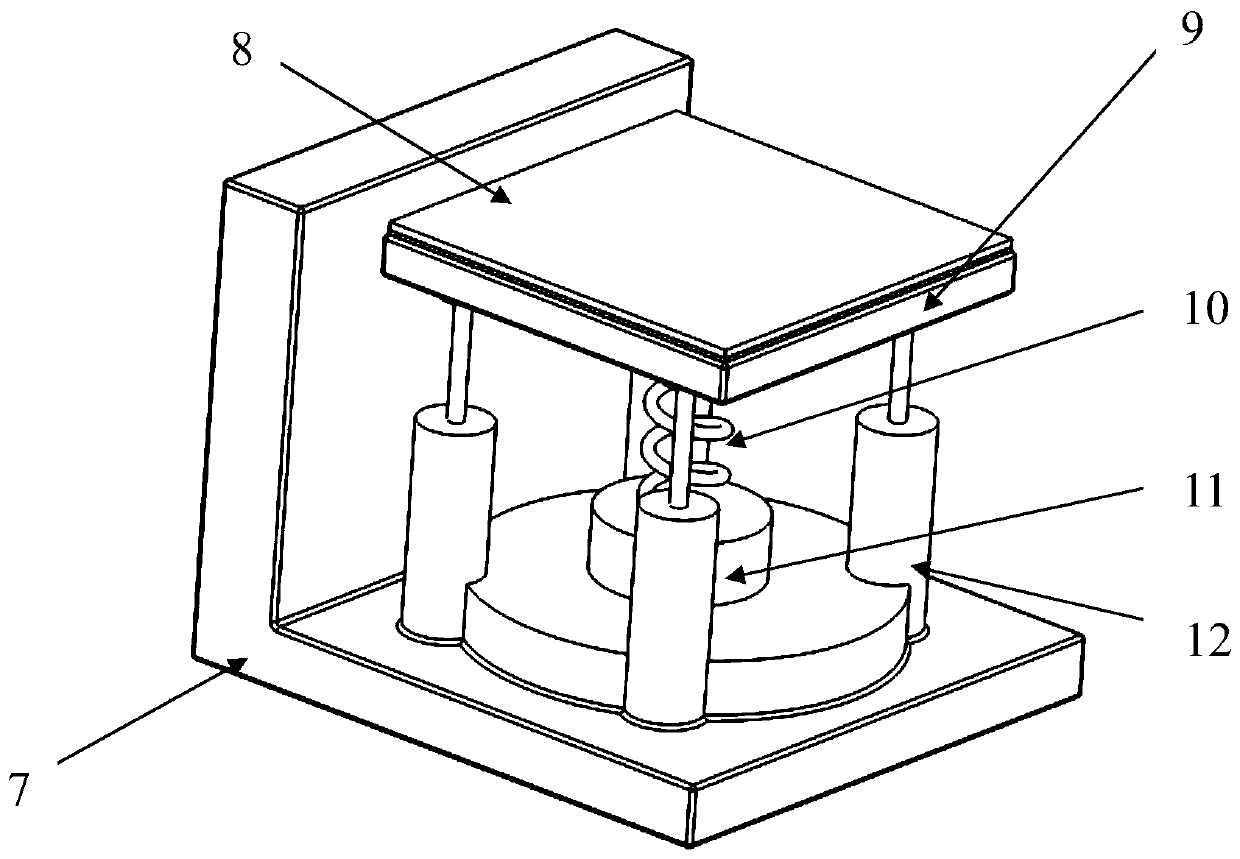
[0026] The invention provides a collaborative robot collision safety testing system and testing method, such as Figure 1-2 shown. The testing system comprises a test bench 1, an angle adjustment seat 4, a force sense system 5, a synchronous control system 2 and a tester 6; wherein: the angle adjustment seat is fixed on the side of the test bench; the force sense system Including the fixed base 7, the fixed base is composed of a bottom plate and a side plate connected vertically. According to the different impact angles of the robot, the fixed base fixes the bottom plate on the upper surface of the test bench through screws or fixes the side plates on the angle adjustment seat through screws. above; the fixed base of the force sense system is installed on the angle adjustment seat; the synchronous control system 2 and the tester 6 are fixed on the upper surf...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com