Multi-robot SLAM algorithm based on sub-map feature matching
A multi-robot, feature matching technology, applied in the direction of instruments, two-dimensional position/channel control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
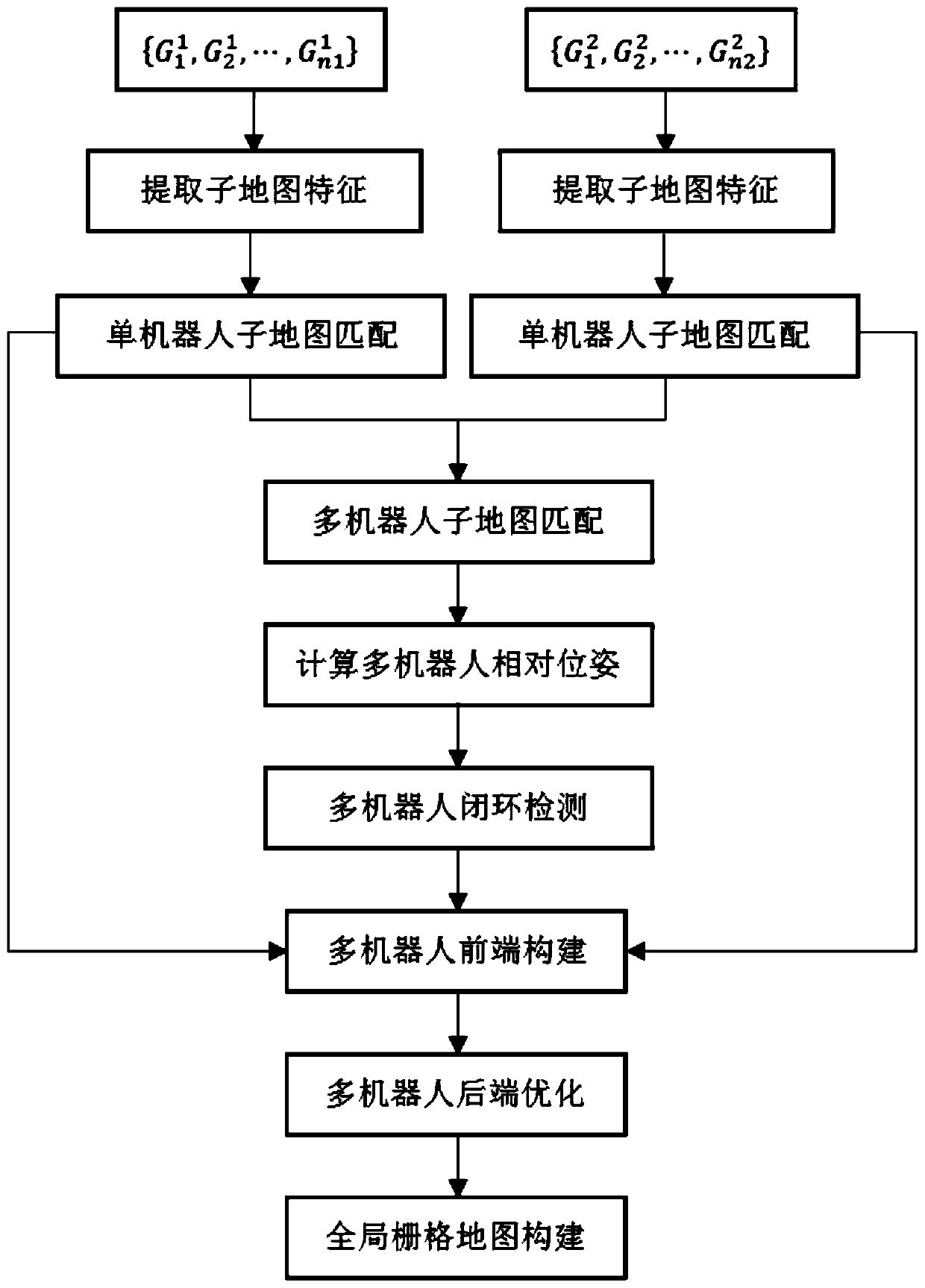
[0047] see figure 1 As shown, a multi-robot SLAM algorithm based on submap feature matching includes the following steps:
[0048] Step 1. Use multiple robots to move in the environment, collect environmental information, and create a submap sequence based on the information.
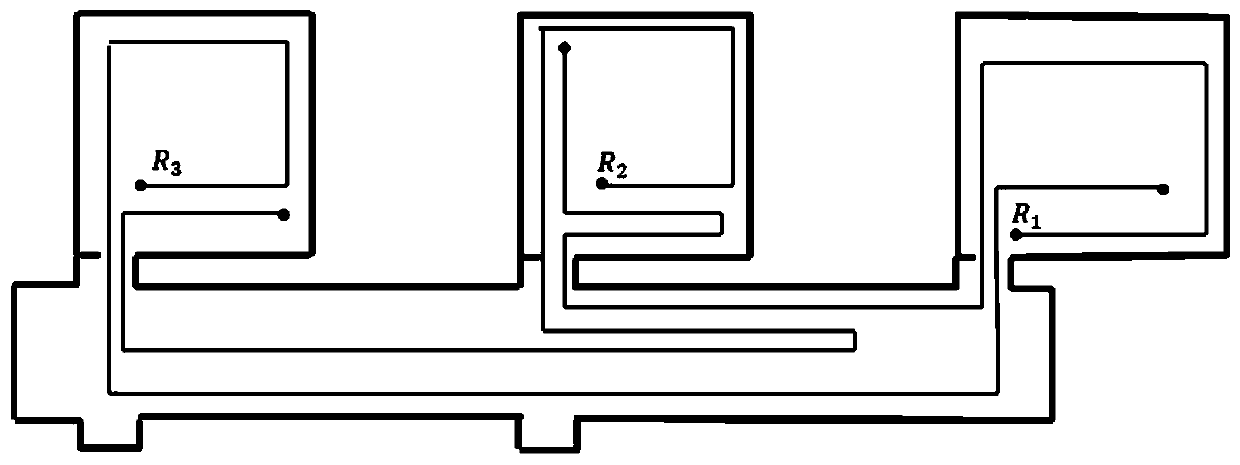
[0049] In this example, see figure 2 As shown, among the plurality of robots in step 1, the trajectory of one robot overlaps with the trajectory of at least one robot among the remaining robots.
[0050] In this embodiment, lidar sensors are installed on the multiple robots in step 1, and a grid map of the environment is created based on the observation information of the lidar.
[0051] Specifically, multiple robots walk in the environment according to a predetermined trajectory. When the collected laser data reaches the threshold, these laser data are used to create a grid sub-map of the environment. Therefore, each robot can create a sub-map based on its own observation data. sequence of maps.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com