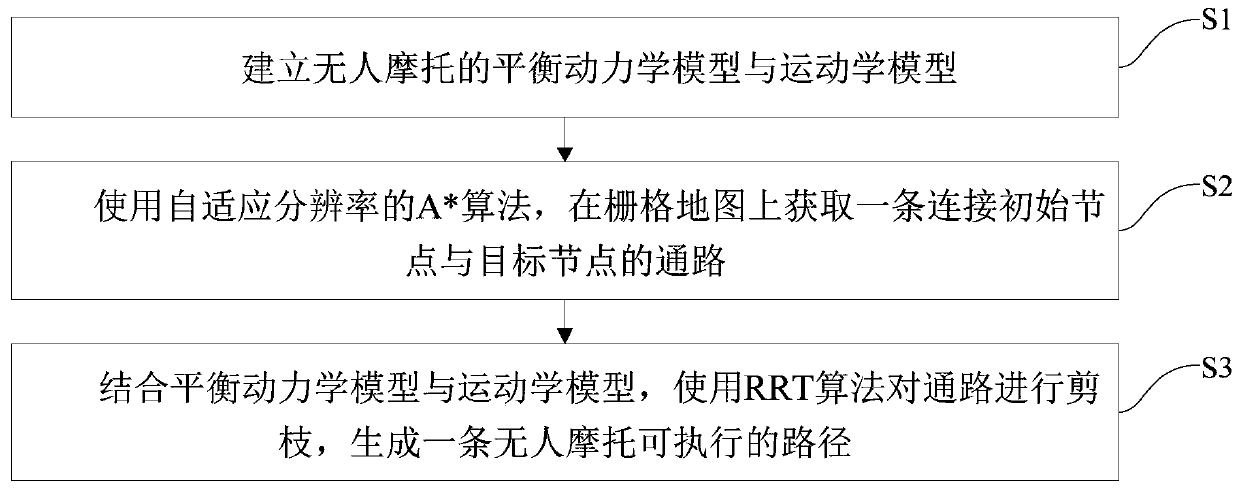
Static obstacle avoidance path planning calculation method for unmanned motorcycle
A path planning and calculation method technology, applied in road network navigator, vehicle position/route/height control, instruments, etc., can solve the problems of not being able to reach online planning, slow convergence speed, low real-time performance, etc., and reduce operation time, ensure safety, and prevent accidental collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0031] First of all, the technical solutions of the prior art and the defects in the technical solutions are described below.
[0032] 1) Heuristic traditional path planning method
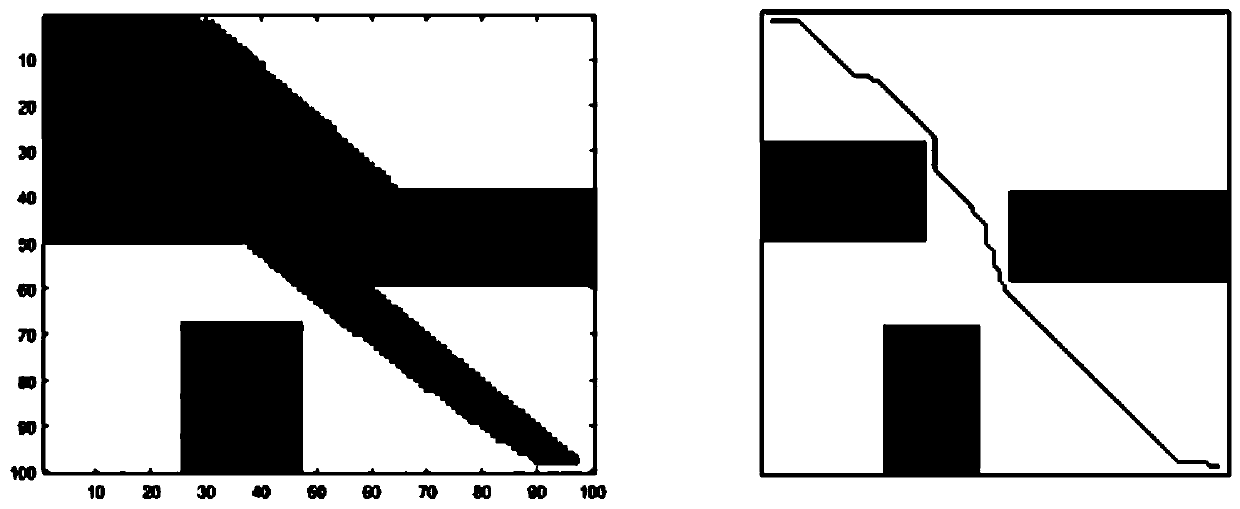
[0033] The A* algorithm is a graph search method. The A* algorithm needs to be used in a discrete grid map. In the basic A* algorithm, follow the steps below for global path planning:
[0034] Step 1: Put the initial node into the open list;
[0035] Step 2: If there is no node in the open list, path exploration fails. Otherwise proceed to the nex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com