Vision acquisition and calibration method, device and system based on multi-degree-of-freedom robotic arm
A technology of visual acquisition and calibration method, applied in the field of intelligent robots, can solve problems such as increasing equipment cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] An embodiment of the present invention introduces a vision acquisition and calibration method based on a multi-degree-of-freedom manipulator.
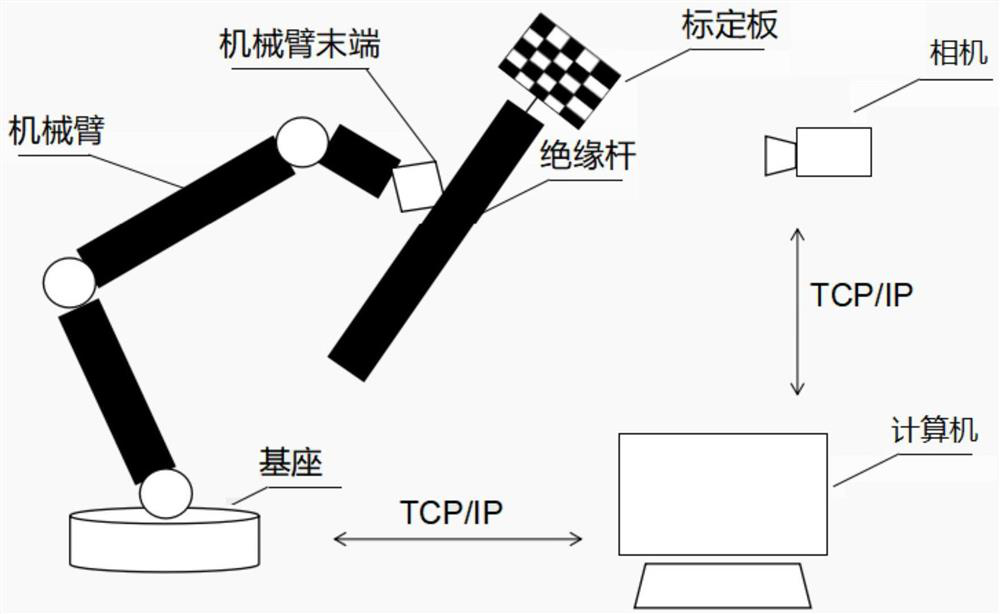
[0040] The calibration system adopted in this embodiment mainly includes a visual acquisition calibration device, a visual acquisition device, and a robotic arm system; the visual acquisition calibration device can be used to process the image captured by the visual acquisition device, and obtain the coordinates of each point in it, and calculate the coordinates Inter-system transformation relationship; the visual acquisition device can be used to capture the image of the calibration plate according to the instructions of the visual acquisition calibration device, and send the corresponding image to the visual acquisition calibration device; the robotic arm system is used to move according to the instructions of the visual acquisition calibration device, And return the coordinates of the calibration board in the coordinate system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com